| アクセス: |
[ジョイントを挿入]ダイアログ ボックスで、[ジョイント テーブルを表示]アイコンをクリックします。 |
ダイアログ ボックスの上部のイメージをクリックして、 ジョイント のあるカテゴリから他のカテゴリに移動します。
標準ジョイント
標準ジョイントは、最も一般的に使用されるジョイントです。これらのジョイントは、回転と移動の自由度のさまざまな組み合わせに基づいています。使用可能なこのカテゴリのジョイントは次のとおりです。
![]() 回転
回転
![]() 角柱状
角柱状
![]() 円柱状
円柱状
![]() 球状
球状
![]() 平面
平面
![]() 点 - 線
点 - 線
![]() 線 - 面
線 - 面
![]() 点 - 面
点 - 面
![]() 空間的
空間的
![]() 溶接
溶接
回転ジョイント
イメージではジョイントをギヤ機構をシミュレートするために使われるように見えますが、実際のギヤ歯先のかみあいは明確になりません。この方法では、ギアの有効回転半径に対し、選択したジオメトリの有効回転半径に基づいてギア比が設定されます。
![]() 回転: 円柱 - 平面
回転: 円柱 - 平面
![]() 回転: 外接円柱
回転: 外接円柱
![]() 回転: 内接円柱
回転: 内接円柱
![]() 回転: 円柱曲線
回転: 円柱曲線
![]() ベルト
ベルト
![]() 回転: 平面上の円錐
回転: 平面上の円錐
![]() 回転: 円錐上の円錐
回転: 円錐上の円錐
![]() 回転: 円錐内の円錐
回転: 円錐内の円錐
![]() ねじ
ねじ
![]() ウォーム ギア
ウォーム ギア
スライド ジョイント
![]() スライド: 面上の円柱
スライド: 面上の円柱
![]() スライド: 円柱上の円柱
スライド: 円柱上の円柱
![]() スライド: 円柱内の円柱
スライド: 円柱内の円柱
![]() スライド: 円柱曲線
スライド: 円柱曲線
![]() スライド: 点 - 曲線
スライド: 点 - 曲線
接触ジョイント
2D 接触ジョイントは正確です。このジョイントは、衝突が発生したことを検出し、さらに分離を発生させます。 サーフェス にはファセットやくい込みがないため、結果に異常がある可能性が少なくなります。カムや被動歯車などの機構を扱うときは、3D 接触ジョイントではなくこれらのジョイントを使用して機構の動作を正確に調べてください。場合によっては、適切な結果を得るために、パーツで追加のジオメトリを作成するか、複数の 2D ジョイントを使用する必要があります。
![]() 2D 接触
2D 接触
連続した「スムーズな」ループを保証するためのジオメトリの修正
2D 接触アルゴリズムに対してスムーズな連続ループを提供するため(計算を改善するため)、少しジオメトリの修正を行います。すばやく接触を解析できる連続ループをもつために、プロファイル内ではすべての不連続は滑らかにされます。次の例でソフトウェア内で何が起こるか説明します。
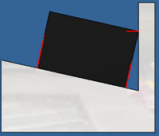 |
平面部をもつブロックを例にします。ブロックはすべての面がブロック面と平行ではない他のコンポーネントと接触します。 ある距離から、予想どおり接触ベクトル(赤色)が現れます。 |
 |
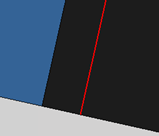
平行でない面の接触領域を拡大すると、接触部でわずかにオーバーラップがあることが分かります。 |
 |
面に平行な接触領域を拡大して、どのように見えるかを左に示しています。 |
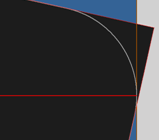 |
イメージ内で左に示すようにダイナミック シミュレーションは自動的にフィレットをスムーズなコーナーにするので、この条件が生じます。ご存知のとおり、接触はフィレットに関して厳格です。 |
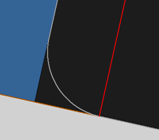 |
平行面ジョイントの場合にも、接触はフィレットに関して厳格です。 |
 |
以下の方法を用いて、フィレットを作成します。
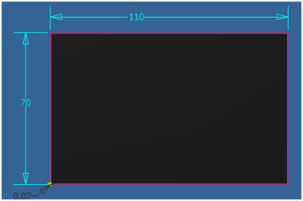
最小値が 5e-6 mm になると、頂点はスムーズではありません。 左図の例では、Lmin = 70 mm であり角度は垂直(90 度)です。したがって、半径は0.07 mm に等しくなります。 |
荷重ジョイント
![]() 3D 接触
3D 接触
![]() ばね/ダンパー/ジャッキ
ばね/ダンパー/ジャッキ
| タイプ | パラメータ | 表示 | コメント |
|---|---|---|---|
| 螺旋ばね | [剛性]、[自由長]、[ダンピング] | 螺旋ばね | 既定のタイプ荷重は 2 点間の距離(剛性と自由長)と 2 点間の速度(ダンピング)に依存します。 |
| [ばね] | [剛性]、[自由長]、[ダンピング] | 離れている、積み重ねた円筒 | 螺旋ばねと同じ動作です。見た目はいくぶん皿座金に似ており、表示時間を最適化します。 |
| ばねダンパー | [剛性]、[自由長]、[ダンピング] | 螺旋ばねとダンパー | 螺旋ばねと同じ動作です。見た目は自動車のショック アブソーバに似ています。 |
| ダンパー | [ダンピング] | ダンパー | ダンピング動作のみ荷重は 2 点間の速度に依存します。 |
| ジャッキ | 入力グラフまたは一定 | ダンパー | 荷重パラメータを直接モデルに適用します。グラフはジャッキ タイプ機構を示します。 |