サーフェス間接触に関連するほとんどのパラメータはソフトウェアによって自動化されますが、モデルによっては、ユーザによる調整が有益な場合があります。このページでは、接触を含む場合に、メカニカル イベント シミュレーションおよび非線形応力モデルのランタイムを向上させるためのヒントの概要を提供します。
適切なメッシュ
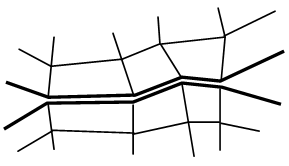
正確な接触解析を実行するには、適度に滑らかな接触面、および接触面上の均一なメッシュを準備することをお勧めします。さらに、サーフェスメッシュの整列は、解析全体のパフォーマンスに影響を与えるため、隣接する各接触面上におけるサーフェスのメッシュ化は、より優れた収束率を達成するために慎重に実行する必要があります。図 1 (a)に示すように、線形接触では、2 つのサーフェスのメッシュが互いに完全に一致する必要があります。ただし、MES では、完全に一致したメッシュは接触チャタリングを引き起こす可能性があります。チャタリングが発生した場合、必然的に非常に質の低い収束率(より長いランタイム)が結果として生じます。 この問題を避けるため、または最低でも最小化するために、接触面の間に小さな相対移動が予測される場合には、図 1 (b)に示すように、メッシュで一方のサーフェス上の節点をもう一方のサーフェスの節点の中央に配置することをお勧めします。(例外: 点間の接触タイプを使用している場合、メッシュは一致する必要があります。ただし、点間の接触タイプでは、節点の相対移動は想定されていません。詳細については、「サーフェス間接触オプション」を参照してください。)CAD モデルのメッシュでは、「メッシュ作成の概要」>「CAD ソリッド モデルをメッシュ化する」>「モデル メッシュ設定」>「 モデル」に説明されている[パーツを一致させない]オプションを使用します。
|
(a) 線形応力では、適切な接触を実現するためメッシュが一致している必要があります。
(b) MES では、面から面または点から面の接触を使用する場合、特に小さな相対移動が発生する場合、メッシュは一致すべきではありません。 |
| 図 1: 接触解析における適切なメッシュ |
反復スキーマ
プロセッサには、反復法処理を制御する 6 つのタイプの非線形解法スキーマが用意されています([設定] [モデル設定][パラメータ][高度] [平衡]タブ)。それらは、修正ニュートン ラフソン法、完全ニュートン ラフソン法、複合ニュートン ラフソン法、およびライン サーチ法を使用するそれら 3 つのオプションです。どのオプションが最適であるか断言することは困難です。しかし、最も少ない反復回数で解析の収束を実現するには、ライン サーチ法あり/なしの完全ニュートン ラフソン法を強くお勧めします。
[モデル設定][パラメータ][高度] [平衡]タブ)。それらは、修正ニュートン ラフソン法、完全ニュートン ラフソン法、複合ニュートン ラフソン法、およびライン サーチ法を使用するそれら 3 つのオプションです。どのオプションが最適であるか断言することは困難です。しかし、最も少ない反復回数で解析の収束を実現するには、ライン サーチ法あり/なしの完全ニュートン ラフソン法を強くお勧めします。
拘束を使用してモデルを安定化させる
パーツが自由に移動したり接触できるようにしておくことが現実的である場合もありますが、パーツを部分的に制約することで向上させることができるモデルもあります。例えば、ヨークとクレビスを通過するピンは現実では自由に回転しますが、通常、回転させる力がないため、ピンは回転しません。この場合、ピンの回転を防ぐ拘束を適用することで、ピンの回転によって発生する可能性のある接触チャタリングを削減できます。同様に、ピンの軸移動がさほど大きくない場合、軸移動を防ぐ拘束によってランタイムを削減できます。
収束率
モデル実行時に残差値(解析ログの最後の列)をチェックします。ソルバーによって時間ステップ サイズが不要に削減されていると判断できる場合(残差が減少しているにも関わらず、収束に向けて解法が処理されている場合)、[低減トリガ: 収束率]設定を[自動]から[取り消し]に変更します。 この設定は、[設定][モデル設定][パラメータ][高度] [時間ステップ]タブにあります。同様に、収束に向けて解法が処理されているにも関わらず、指定した反復最大数(既定は 15)に達しているため時間ステップが解法によって削減されている場合は、反復回数を増やします。時間ステップを分割して反復処理を再開するよりも、より多くの反復を可能にする方法が適しています。この設定は、[解析]: [パラメータ]: [高度]ダイアログの[平衡]タブにあります。
自動設定の有無
接触解析において最も困難な手順は、適切な接触パラメータの決定です。接触パラメータで自動設定を選択すると、プロセッサによって、初期接触面のジオメトリ、メッシュ、材料の定数に基づき適切な値が計算されます。しかし、こうした既定値は、ボディに大規模な変形が発生した後では有効ではありません。接触パーツに大きな変形が発生することが予測される場合、解析を実行する前に次の項目を考慮し、適切な値を決定する必要があります。
接触剛性
経験則として、より柔らかい材料の係数の 10 分の 1 の接触剛性を使用する方法があります。非常に柔らかい材料と硬い材料の接触(例えばフォームとメタルの接触)では、10 分の 1 則および剛性計算数式で適切な値の提供に失敗し、重大な接触チャタリングまたは大きなくい込みを引き起こす可能性があります。適用可能な接触剛性法を使用しても、数回の反復を通して適切な剛性値が見つかるまで、不適切な収束を避けることができません。このような場合、同じ材料および荷重条件を使用した簡単な 2D モデルを使用して、数回のテスト ケースを実行する必要があります。柔らかい材料のヤング率に比べ比較的小さな数値から、10 の係数で接触剛性を増加させ、大きなくい込みが発生しなくなる最小値が見つかるまで、接触剛性を複数回テストします。最初のテストが終了したら、反復の回数を数えて、収束率をチェックします。グローバル収束が適切ではなく、大きなくい込みが発生していない場合は、剛性値が大きすぎる可能性があり、その値を減らしてテストを再実行する必要があります。
詳細については、「サーフェス間接触の高度コントロール」ページの[一般]タブの説明を参照してください。
接触タイプ
サーフェス間接触には、3 つの接触レベルがあります。各レベルでは、検出された接触についての詳細を考慮します。予測されるパーツの動きと形状に基づいて、自動設定よりも高速な解法を提供する接触タイプを選択できる場合があります。接触タイプの概要を次に示します。
- [点間]: 節点同士のみが接触できます。そうでない場合は、1 つのボディの節点が別のボディのサーフェスを通過します。
- [点サーフェス間]: 2 次パーツの節点は、1 次パーツのサーフェスと接触できます。だたし、第一パーツの節点は、第二パーツのサーフェスを通過できます。(これrは、一方接触検出として捉えることができます。)
- [サーフェス間]: 第二パーツの節点が第一パーツのサーフェスと接触できます。さらに、第一パーツの節点は、第二パーツのサーフェスと接触できます。したがって、このタイプは接触検出の最も完全なレベルですが、より多くの計算を必要します。
接触パラメータ(適用可能な接触剛性および接触グループ更新以外)の計算時に、比較的小さな変形が想定されます。ローカライズされた領域にも 50% より大きなひずみが発生するなど、大きな変位または変形が接触面で発生する場合、この基本的な想定は、接触パラメータ(マスターおよびターゲット サーフェス、接触タイプ、接触拡張領域)の計算で有効ではなくなります。ユーザは、変形後の形状を事前に考慮して、パラメータを選択する必要があります。
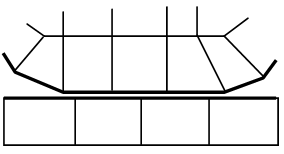
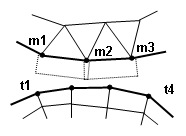
図 2 は、自動設定による失敗を示しています。初期のジオメトリを考慮すると、マスター サーフェス(最初のパーツ/サーフェス)上のセグメントがターゲット サーフェス(2 番目のパーツ/サーフェス)上のセグメントに比べ非常に大きいため、点から面の接触が適切な選択であることが判断できます。しかし、ターゲットパーツの変形後では、ターゲット サーフェスのセグメント サイズがマスター サーフェスよりも大きくなります。その結果、セグメント m1-m2 におけるターゲット節点の検出の失敗、およびターゲット サーフェスにおける接触とくい込みの損失という状況が発生します。この状況では、サーフェス間接触を使用することを強くお勧めします。
詳細については、「サーフェス間接触オプション」ページを参照してください。
|
(a) 元のジオメトリから判断すると、点サーフェス間接触タイプが受け入れ可能です(点は目標節点です。t1-t5 がマスター節点のサーフェス m1-m2 に接触します)。
(b) 変形後、ターゲット サーフェス(t1-t5)の節点のいずれも、マスターのサーフェス(m1-m2)に接触しません。変形によって、面から面の接触が必要になります。 |
| 図 2: 大きな変形による接触タイプ自動選択の失敗 |
[接触要素側を拡張]
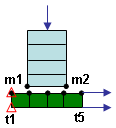
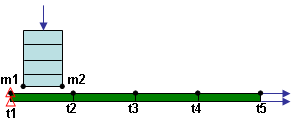
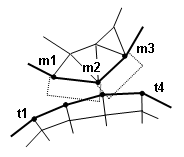
接触領域の拡張では、初期の接触面が平坦または低い曲率である場合、拡張接触領域を計算する自動設定によって小さな拡張が発生します。パーツを変形すると、接触領域が広がり、接触にゴースト領域または穴が発生します。こうした領域では、ターゲット節点は検出されません。図 3 を参照してください。
|
(a) 元のジオメトリから判断して、[接触要素側を拡張]をマスター サーフェス(m1-m2-m3)のいくつかの値に設定します。(接触面は点線で示されています。)
(b) マスター サーフェス(m1-m2-m3)を変形して急な曲率を作成すると、[接触要素側を拡張]が小さすぎるため、ターゲット サーフェス(t3)上の節点が接触側間のゴースト領域に配置されてしまうのを避けることができません。 |
| 図 3: 大きな変形による[接触要素側を拡張]の自動選択 |
接触面に急なエッジや大きなスライド運動が生じる場合、[接触要素側を拡張]の値は、収束において非常に重要な役割を持ちます。詳細については、「サーフェス間接触の高度コントロール」ページの[ジオメトリ タブ]セクションを参照してください。