
-
Wählen Sie eine oder mehrere steife Körper (MassFX) aus. > Dialogfeld "MassFX-Hilfsmittel" > (Multiobjekt-Editor)
Bei Verwendung der Gruppe "Bearbeiten" mit einer Auswahl von steifen Körpern beachten Sie Folgendes:
- Sie können neue Voreinstellungen für physikalische Materialien nur in der Gruppe "Multiobjekt-Editor" und nicht in der Modifikator-Benutzeroberfläche erstellen.
- Das Bearbeiten der Eigenschaft Physikalisches Netz mit der Gruppe Multiobjekt-Editor ist auf steife Körper mit jeweils einer einzelnen physikalischen Kontur beschränkt. Zum Bearbeiten bzw. Erstellen von Objekten mit mehreren Netzen verwenden Sie den Modifikator Rollout "Physikalische Konturen".
Benutzeroberfläche
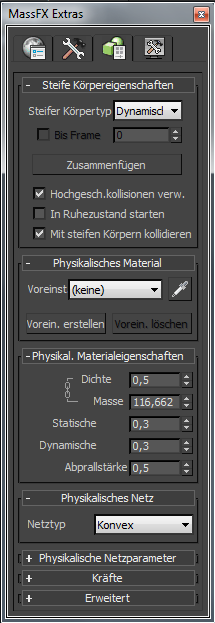
Rollout "Steife Körpereigenschaften"
Mit einer Ausnahme sind diese Steuerelemente nur verfügbar, wenn alle ausgewählten Objekte getrennte steife Körper sind. Der Unterschied ist: Wenn die Auswahl ausschließlich aus eingebackenen steifen Körpern besteht, ist die Schaltfläche "Trennen" verfügbar, um die Objekte in ihren getrennten Status zurückzuführen.
- Typ "Steifer Körper"
- Der Simulationstyp für alle gewählten steifen Körper. Die verfügbaren Optionen sind "Dynamisch", "Kinematisch" und "Statisch". Weitere Informationen finden Sie unter Steife Körpertypen: "Dynamisch", "Kinematisch" und "Statisch".
- Bis Frame
- Wenn diese Option aktiviert ist, konvertiert MassFX die gewählten kinematischen Körper am angegebenen Frame in dynamische Körper. Nur verfügbar, wenn "Steifer Körpertyp" auf "Kinematisch" gesetzt ist.
Das heißt, Sie können ein Objekt mit Standardmethoden animieren und "Steifer Körpertyp" auf "Kinematisch" setzen, sodass es bis zum festgelegten Frame so wie animiert ausgeführt wird. An diesem Punkt wird es zu einem dynamischen Objekt und unterliegt dann den vollständigen Kräften der MassFX-Simulation.
Um beispielsweise ein Baseballspiel neu zu erstellen, könnten Sie den Ball animieren, wenn er die Hand des Werfers verlässt und in Richtung des Baseballschlägers fliegt. Wenn der Ball auf den Schläger auftrifft, übernimmt dann MassFX mit "Bis Frame" die Kontrolle und simuliert ganz genau die Aktion des Schlagmanns, der einen Home Run erzielt (oder ein Foul begeht).
Tipp: Ein steifer Körper muss nicht animiert werden, um diese Funktion zu nutzen. So können Sie z. B. mehrere stationäre Körper anhalten und diese dann zu unterschiedlichen Zeitpunkten ablegen. Legen Sie dazu einfach alle auf "Kinematisch" fest, und aktivieren Sie "Bis Frame". Wählen Sie dann jeden Körper einzeln aus, und geben Sie den Frame an, bei dem er der Schwerkraft unterliegen soll. - Einbacken/Trennen
- Wandelt die simulierte Bewegung der gewählten, getrennten steifen Körper in vorgegebene Animations-Keyframes um. Gilt nur für dynamische steife Körper und ist nur verfügbar, wenn alle gewählten steifen Körper eingebacken bzw. getrennt sind (keine Kombination).
Wenn alle gewählten steifen Körper eingebacken sind, trägt die Schaltfläche die Beschriftung "Trennen". Beim Klicken auf diese werden die Keyframes entfernt und der Status "Dynamisch" der Körper wiederhergestellt.
- Hochgeschwindigkeitskollisionen verwenden
- Wenn diese Option aktiviert ist und die Gruppe "Welt"
 "Hochgeschwindigkeitskollisionen verwenden" aktiviert ist, gelten die Einstellungen für Hochgeschwindigkeitskollisionen für ausgewählte steife Körper.
"Hochgeschwindigkeitskollisionen verwenden" aktiviert ist, gelten die Einstellungen für Hochgeschwindigkeitskollisionen für ausgewählte steife Körper. - In Ruhezustand starten
- Wenn diese Option aktiviert ist, starten ausgewählte steife Körper die Simulation im Ruhezustand mithilfe der globalen Ruhezustandseinstellungen. Dies bedeutet, dass sie sich nicht bewegen, bis sie von einem steifen Körper angestoßen werden, der sich nicht im Ruhezustand befindet. Um beispielsweise das Fallen von Dominosteinen zu simulieren, starten Sie alle Dominos außer dem ersten im Ruhezustand.
- Mit steifen Körpern kollidieren
- Wenn diese Option aktiviert ist (Vorgabe), kollidieren ausgewählte steife Körper mit anderen steifen Körpern in der Szene.
Rollout Physikalisches Material
Dieses Rollout enthält grundlegende Hilfsmittel für die Verwendung von physikalischen Materialien, die festlegen, wie steife Körper mit anderen Elementen in der Simulation interagieren. Um bestimmte Werte einzustellen, verwenden Sie das Rollout "Physikalische Materialeigenschaften" (siehe unten).

- Voreinstellen
- Wählen Sie ein voreingestelltes Material aus der Dropdown-Liste, um alle Werte im Rollout "Physikalische Materialeigenschaften" in die in der Voreinstellung gespeicherten Werte zu ändern und diese Werte auf die Auswahl anzuwenden.
Um die Einstellungen von einem anderen steifen Körper in der Szene zu verwenden, klicken Sie auf
 , und wählen Sie dann einen steifen Körper in der Szene aus.
, und wählen Sie dann einen steifen Körper in der Szene aus. Wenn Sie den MassFX-Modifikator "Steifer Körper" zum ersten Mal einem Objekt zuweisen, weist MassFX einen Vorgabesatz von physikalischen Materialeigenschaften (einschließlich Dichte = 0,5 usw.), aber kein physikalisches Material, zu. Damit ist die aktive Voreinstellung "(Keine)", und Sie können die Materialeigenschaften umgehend bearbeiten. Wenn Sie eine Voreinstellung aus der Liste zuweisen, werden die Einstellungen im Rollout "Physikal. Materialeigenschaften" angezeigt, sind jedoch gesperrt und nicht verfügbar. Um die Einstellungen zu bearbeiten, geben Sie sie durch Klicken auf die Sperrschaltfläche frei.
- Vorein. Erstellen
- Erstellt anhand der aktuellen Werte eine neue Voreinstellung für physikalisches Material. Öffnet das Dialogfeld " Physikalischer Materialname", in dem Sie einen Namen für die neue Voreinstellung eingeben können. Wenn Sie auf "OK" klicken, wird das neue Material aktiv und in der Liste der Voreinstellungen hinzugefügt.
- Voreinstellung löschen
- Entfernt die aktuelle Voreinstellung aus der Liste und setzt die Liste auf "(Keine)". Die aktuellen Werte werden beibehalten.
Rollout "Physikal. Materialeigenschaften"
Die physikalischen Materialeigenschaften steuern, wie die steifen Körper mit anderen Elementen in der Simulation interagieren: Masse, Reibung, Abprallstärke usw. Nachdem Sie die Eigenschaften festgelegt haben, können Sie sie als Voreinstellung mit den Steuerelementen im Rollout "Physikalisches Material" (siehe oben) speichern.
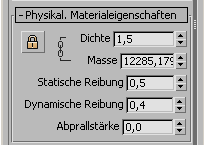
 Sperren/Freigeben
Sperren/Freigeben- Wenn diese Option aktiviert ist (dies erkennen Sie am farbigen Hintergrund), können die Eigenschaftseinstellungen für die aktive Voreinstellung nicht bearbeitet werden. Um die Werte zu bearbeiten, klicken Sie zunächst auf diese Schaltfläche, um die Einstellungen freizugeben.
Wenn eine Voreinstellung zugewiesen ist, sind die Einstellungen standardmäßig gesperrt. Wenn keine Voreinstellung zugewiesen ist (dies erkennen Sie an der Beschriftung "(Keine)"), steht die Schaltfläche "Sperren" nicht zur Verfügung, und die Einstellungen können immer bearbeitet werden.
Verwenden Sie nach der Bearbeitung der Eigenschaftswerte (siehe oben) die Option "Vorein. Erstellen", um sie in einer neuen Voreinstellung zu speichern. Andernfalls gehen die bearbeiteten Werte verloren, wenn Sie eine andere Voreinstellung wählen.
- Dichte
- Die Dichte des steifen Körpers, gemessen in g/cm3 (Gramm pro Kubikzentimeter). Dies ist ein Tausendstel des entsprechenden Maßes in SI-Einheiten: kg/m3. Beim Ändern dieses Werts wird automatisch die korrekte Masse für das Objekt anhand des Volumens berechnet.
- Masse
- Das Gewicht dieses steifen Körpers, gemessen in kg (Kilogramm). Durch das Ändern dieses Werts wird die Dichte des Objekts anhand des Volumens automatisch aktualisiert.
- Haftreibung
- Der Schwierigkeitsgrad dafür, dass zwei steife Körper anfangen, gegeneinander zu rutschen. Ein Wert von 0.0 bedeutet keine Reibung (glatter als Teflon); ein Wert von 1.0 bedeutet volle Reibung (Gummikitt auf Sandpapier).
Die effektive statische Reibung zwischen zwei steifen Körpern ist das Produkt der statischen Reibungswerte. Wenn ein steifer Körper eine statische Reibung von 0,0 hat, spielt der Wert des anderen Körpers keine Rolle. (Alles rutscht auf nassem Eis, auch Sandpapier). Sobald zwei Objekte zu rutschen beginnen, gilt stattdessen die dynamische Reibung (siehe unten).
- Dynamische Reibung
- Die Wahrscheinlichkeit, dass zwei steife Körper gegeneinander rutschen. Technisch gesehen wird dieser Parameter als "Koeffizient der kinematischen Reibung" bezeichnet Ein Wert von 0,0 bedeutet keine Reibung (glatter als Teflon); ein Wert von 1,0 bedeutet volle Reibung (Gummikitt auf Sandpapier).
In der realen Welt sollte dieser Wert kleiner sein als der Koeffizient der statischen Reibung. (Es ist schwieriger, mit dem Verschieben eines Sofas über den Boden zu beginnen, als mit dem Verschieben fortzufahren.) Wie bei der statischen Reibung ist der tatsächliche Wert zwischen zwei steifen Körpern das Produkt der jeweiligen Werte.
- Abprallstärke
- Wie einfach und hoch ein Objekt abprallt, wenn es auf einen anderen steifen Körper trifft. Technisch gesehen wird dieser Parameter als "Koeffizient der Rückgabe" bezeichnet. Ein Wert von 0,0 bedeutet kein Abprallen (ein auf den Teppich gefallener Klumpen Erdnussbutter). Ein Wert von 1,0 bedeutet, dass das Objekt ungefähr genauso hart abprallt, wie es auftrifft.
Die effektive Abprallstärke zwischen zwei steifen Körpern ist das arithmetische Mittel ihrer Abprallwerte: Addieren Sie ihre Abprallwerte und dividieren Sie sie durch 2. Wenn also zwei Körper mit Abprallwerten 0,5 zusammenprallen, führt dies zum gleichen Ergebnis wie wenn ein Körper mit Abprallstärke von 1,0 an einem Körper mit Abprallstärke 0,0 abprallt.
Tipp: Wenn wiederholtes Abprallen plötzlich stoppt oder zu lang wird, setzen Sie "Abpralleinstellungen" auf "Manuell" und passen den Wert "Min.geschwindig." an. Um das Abprallen zu verlängern, senken Sie "Min.geschwindig.". Um es früher zu stoppen, erhöhen Sie "Min.geschwindig.".
Rollout für physikalisches Netz
Das physikalische Netz eines steifen Körpers (auch als physische Kontur bekannt) ist seine Darstellung in der Simulation. Weitere Informationen finden Sie unter Steifen Körper - Überblick.
- Netztyp
-
Der Typ der physikalischen Kontur für ausgewählte steife Körper. Die verfügbaren Typen sind "Kugel", "Quader", "Kapsel", "Konvex", "Konkav", "Original" und "Benutzerdefiniert". "Kugel", "Quader" und "Benutzerdefiniert" sind MassFX-Grundkörper. Sie werden schneller simuliert als die anderen. Um eine optimale Leistung zu erzielen, verwenden Sie den einfachsten Typ, der möglich ist.
Beim Ändern des Konturtyps wird im Allgemeinen eine neue physikalische Kontur des gewählten Typs in einer um das grafische Netz passenden Größe erstellt. Die Ausnahme ist der Typ "Konkav", der manuell generiert werden muss. Die verfügbaren Optionen hängen vom aktiven Konturtyp ab und können im Rollout "Physikalische Netzparameter" (siehe unten) ausgewählt werden.
Anmerkung: Diese Einstellung ist nicht verfügbar, wenn ein beliebiges ausgewähltes Objekt mehrere physikalische Konturen verwendet. Das Rollout kann nicht zum Erstellen mehrerer physikalischer Konturen für steife Körper verwendet werden. Verwenden Sie in solchen Fällen den Modifikator Rollout "Physikalische Konturen" mit einem einzelnen ausgewählten Objekt.
Rollout "Physikalische Netzparameter"
Der Inhalt dieses Rollouts variiert je nach Netztypeinstellung (siehe oben). Eine Beschreibung der Parameter für jeden Typ finden Sie unter Physikalische Konturtypen in MassFX.
Rollout Kräfte
Verwenden Sie das Rollout "Kräfte" zur Steuerung der Schwerkraft und Anwendung von Kraft-Space-Warps auf den steifen Körper.
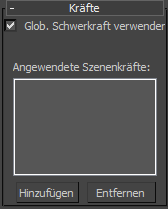
- Welt-Schwerkraft verwenden
- Wenn diese Option deaktiviert ist, verwendet der ausgewählte steife Körper nur Kräfte, die hier angewendet werden, und ignoriert die Einstellung für globale Schwerkraft. Wenn diese Option aktiviert ist, verwendet der steife Körper die Einstellung Globale Schwerkraft.
- Angewendete Szenenkräfte
- Listet die in der Szene enthaltenen Kraft-Space-Warps auf, die sich auf die ausgewählten steifen Körper in der Simulation auswirken. Verwenden Sie "Hinzufügen" (siehe unten), um einen Space Warp auf eine Auswahl anzuwenden. Um zu verhindern, dass ein Space Warp sich auf eine Auswahl auswirkt, markieren Sie ihn in der Liste, und klicken Sie dann auf "Entfernen".
- Hinzufügen
- Wendet einen Kraft-Space-Warp in der Szene auf ausgewählte steife Körper in der Simulation an. Nachdem der Space-Warp der Szene hinzugefügt wurde, klicken Sie auf "Hinzufügen", und wählen Sie den Space Warp im Ansichtsfenster.
- Entfernen
- Verhindert, dass sich ein angewendeter Space Warp auf die Auswahl auswirkt. Markieren Sie ihn zuerst in der Liste, und klicken Sie dann auf "Entfernen".
Rollout "Erweiterte Einstellungen"
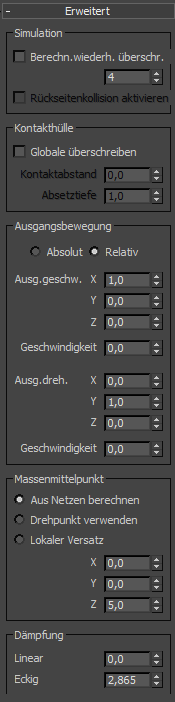
Bereich "Simulation"
- Berechn.wiederh. überschr.
- Wenn diese Option aktiviert ist, verwenden Sie die hier angegebene Einstellung für Berechnungswiederholungen für ausgewählte steife Körper statt der globalen Einstellung.
Legen Sie den numerischen Wert mit der Häufigkeit fest, mit der von der Berechnung Kollisionen und Beschränkungen erzwungen werden. Höhere Werte können erforderlich sein, wenn die Simulation viele Beschränkungen verwendet oder die Toleranz für die Gelenkfehler sehr niedrig ist. Ein Wert über 30 ist normalerweise nicht erforderlich.
- Rückseitenkollision aktivieren
- Nur für statische steife Körper verfügbar. Wenn Sie den Konturtyp "Original" für einen konkaven statischen steifen Körper festlegen, aktivieren Sie diese Option, um sicherzustellen, dass dynamische Objekte in der Simulation mit ihren Rückseiten kollidieren.
Beispiel: Nehmen Sie einen Quader-Grundkörper, konvertieren Sie ihn in ein bearbeitbares Poly, entfernen Sie eine Seite, und machen Sie daraus mit dem Konturtyp "Original" einen statischen steifen Körper daraus. Wenn Sie dann ein dynamisches Objekt in den Quader platzieren, aktivieren Sie die Option "Rückseitenkollision aktivieren", damit das Objekt nicht durch die Seiten fallen kann.
Bereich Kontakthülle
Verwenden Sie diese Einstellungen, um das Umgebungsvolumen zu bestimmen, in dem MassFX Kollisionen zwischen Körpern in der Simulation erkennt.
- Globale überschreiben
- Wenn diese Option aktiviert ist, verwendet MassFX die hier angegebenen Einstellungen für die Kollisionsüberlappung für ausgewählte steife Körper statt der globalen Einstellungen.
- Kontaktabstand
- Die Entfernung, mit der die sich bewegenden steifen Körper überlappen können.
Ein übermäßig hoher Wert kann dazu führen, dass sich Objekte gegenseitig sichtbar durchdringen. Wenn dieser Wert zu niedrig ist, kann Zittern auftreten, da Objekte sich abwechselnd in einem Frame überschneiden und im nächsten Frame getrennt werden.
Der beste Wert hängt von verschiedenen Faktoren ab, einschließlich der Größe der Objekte in der Szene, der Nähe der Kamera zu möglichen Durchdringungen, der Einstellungen für die Schwerkraft und die Wiederholungsberechnung, des Aufblähungsbetrags der physikalischen Kontur und der Frame-Rate der Simulation.
- Absetztiefe
- Die Entfernung, mit der die ruhenden steifen Körper überlappen können. Diese Einstellung kann berücksichtigt werden, wenn Sie die Option Transformation erfassen verwenden, um Körper auf ihre Anfangspositionen in der Simulation festzulegen. Anmerkung: Durch Ändern des Werts für den Kontaktabstand ändert sich automatisch auch der Wert für die Absetztiefe auf den Wert für den Kontaktabstand plus der Differenz zwischen den beiden Werten. Beispiel: Nehmen wir an, dass der Kontaktabstand den Wert 10.0 und die Absetztiefe den Wert 8.0 hat (Differenz = -2.0). Wenn Sie dann den Kontaktabstand auf einen Wert von 6.5 ändern, ändert sich die Absetztiefe automatisch auf 4.5 (6.5 + (-2.0)). Das Ändern der Absetztiefe wirkt sich jedoch nicht auf den Kontaktabstand aus.
Bereich "Ausgangsbewegung"
- Absolut/Relativ
- Diese Einstellung gilt nur für steife Körper, die ursprünglich kinematische Körper waren (diese sind in der Regel bereits animiert) und dann ab dem in der Einstellung "Bis Frame" im Rollout "Steife Körpereigenschaften" festgelegten Frame zu dynamischen Körpern werden. Normalerweise wird die Ausgangsgeschwindigkeit und -drehung solcher Körper anhand der Animation für den letzten Frame berechnet, bevor sie zu dynamischen Körpern werden. Wenn diese Option auf "Absolut" gesetzt wird, werden die Werte für die Ausgangsgeschwindigkeit und -drehung (siehe unten) anstelle der animationsbasierten Werte verwendet. Wenn sie auf "Relativ" eingestellt ist, werden die angegebenen Werte zu den aus der Animation berechneten Werten addiert.
- Ausg.geschw.
- Die Ausgangsrichtung und -geschwindigkeit (in Einheiten pro Sekunde) für den steifen Körper, wenn er dynamisch wird. Die Parameter XYZ werden als normalisierter Vektor verwaltet, der schwer zu bearbeiten sein kann oder schwer vorstellbar ist. Um sich die Ausgangsgeschwindigkeitsrichtung vorzustellen und optional mit dem Hilfsmittel "Drehen" zu ändern, verwenden Sie die Unterobjektebene "Ausg.geschw.".
- Ausg.dreh.
- Die Ausgangsachse und -geschwindigkeit (in Grad pro Sekunde) für die Rotation des steifen Körpers, wenn er dynamisch wird. Die Parameter XYZ werden als normalisierter Vektor verwaltet, der schwer zu bearbeiten sein kann oder schwer vorstellbar ist. Um sich die Achse der Ausgangsdrehung vorzustellen und sie gegebenenfalls mit dem Hilfsmittel "Drehen" zu ändern, verwenden Sie die Unterobjektebene "Ausg.dreh.".
Bereich "Massenmittelpunkt"
Der Punkt, um den sich ein steifer Körper dreht, wenn er keine Beschränkungen hat. Verwenden Sie die Unterobjektebene "Massenmittelpunkt", um diesen Punkt für den steifen Körper grafisch zu visualisieren und zu ändern.
Wählen Sie eine der folgenden Optionen:
- Aus Netzen berechnen Bestimmt automatisch einen geeigneten Massenmittelpunkt für den steifen Körper basierend auf der Geometrie.
- Drehpunkt verwenden Verwendet den Drehpunkt des Objekts als Massenmittelpunkt.
- Lokaler Versatz Mit dieser Option können Sie eine Entfernung vom Drehpunkt des Objekts auf der X-, Y- und Z-Achse festlegen, die als Massenmittelpunkt verwendet wird.
Bereich "Dämpfung"
Dämpfung verlangsamt die steifen Körper. Typische Verwendungsweisen umfassen das Reduzieren von Schwingungen in einer Simulation oder der Effekt, dass sich ein Objekt durch ein dichtes Medium bewegt.
- Linear
- Die Größe der Kraft, die angewendet wurde, um die Geschwindigkeit sich bewegender Objekte zu reduzieren.
- Eckig
- Die Größe der Kraft, die angewendet wurde, um die Rotationsgeschwindigkeit sich bewegender Objekte zu reduzieren.