Damit ein geometrisches Objekt Bestandteil einer physikalischen Simulation sein kann, muss der MassFX steifer Körper-Modifikator darauf angewendet werden. (Verwenden Sie alternativ den mCloth-Modifikator.) Die einfachste Möglichkeit, ein Objekt in einen steifen Körper umzuwandeln, besteht darin, das Objekt auszuwählen und anschließend aus dem Flyout im MassFX-Werkzeugkasten den geeigneten Typ für steife Körper auszuwählen.
-
Ein oder mehrere geometrische Objekte auswählen. >
 Modifikatorgruppe > Modifikatoren-Liste > Objektraummodifikatoren > MassFX RBody
Modifikatorgruppe > Modifikatoren-Liste > Objektraummodifikatoren > MassFX RBody
Die Modifikatoroberfläche enthält in der Modifikatorgruppe mehrere Rollouts sowie einen Modifikatorstapel mit vier Unterobjektebenen. Die meisten Steuerelemente in diesem Rollout sind nur für getrennte steife Körper verfügbar und stehen nicht zur Verfügung, wenn Sie die Bewegung eines Objekts eingebacken haben. Um die Steuerelemente wiederherzustellen, klicken Sie im Rollout "Steife Körpereigenschaften" auf die Schaltfläche "Trennen".
Benutzeroberfläche
Modifikatorstapel: Unterobjektebenen
Der Modifikatorstapel für steife Körper bietet Zugriff auf die Darstellung von mehreren Einstellungen, die sich auf die Simulation auswirken. Wenn eine Unterobjektebene aktiv ist, können Sie ändern, wie die Simulation beginnt und fortgesetzt wird, indem Sie den entsprechenden Gizmo umwandeln.
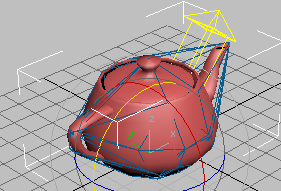
- Anfangsgeschwindigkeit
- Diese Ebene zeigt eine Visualisierung der Richtung der Anfangsgeschwindigkeit für den steifen Körper. Verwenden Sie das Werkzeug "Drehen", um die Richtung zu ändern.
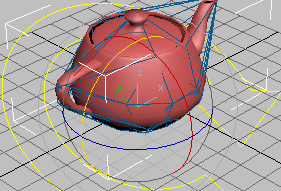
- Anfangsdrehung
-
Diese Ebene zeigt eine Visualisierung der Achse und Richtung der Ausgangsgeschwindigkeit für den steifen Körper. Verwenden Sie das Werkzeug "Drehen", um die Achse zu ändern.
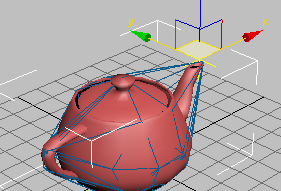
- Massenmittelpunkt
-
Diese Ebene zeigt eine Visualisierung der Position des Massenmittelpunkts für den steifen Körper. Verwenden Sie das Werkzeug "Verschieben", um die Position zu ändern.
- Netztransformation
-
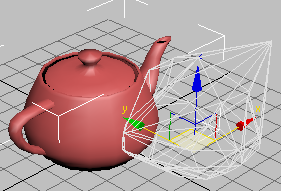
Auf dieser Ebene können Sie die Position und Drehung einer physikalischen Kontur für den steifen Körper anpassen. Heben Sie die zu transformierende physikalische Kontur in der Liste des Rollouts Physikalische Konturen hervor. Die physikalische Kontur wird in den Ansichtsfenstern als ein weißes Drahtgittermodell gezeichnet. Verwenden Sie die Hilfsmittel Verschieben und Drehen, um die relative Platzierung der physikalischen Kontur in Bezug auf den steifen Körper anzupassen.
Rollout "Steife Körpereigenschaften"
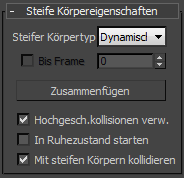
- Typ "Steifer Körper"
- Der Simulationstyp für alle gewählten steifen Körper. Die verfügbaren Optionen sind "Dynamisch", "Kinematisch" und "Statisch". Weitere Informationen finden Sie unter Steife Körpertypen: "Dynamisch", "Kinematisch" und "Statisch".
- Bis Frame
- Wenn diese Option aktiviert ist, konvertiert MassFX den gewählten kinematischen Körper am angegebenen Frame in einen dynamischen Körper. Nur verfügbar, wenn "Steifer Körpertyp" auf "Kinematisch" gesetzt ist.
Das heißt, Sie können ein Objekt mit Standardmethoden animieren und "Steifer Körpertyp" auf "Kinematisch" setzen, sodass es bis zum festgelegten Frame so wie animiert ausgeführt wird. An diesem Punkt wird es zu einem dynamischen Objekt und unterliegt dann den vollständigen Kräften der MassFX-Simulation.
Um beispielsweise ein Baseballspiel neu zu erstellen, könnten Sie den Ball animieren, wenn er die Hand des Werfers verlässt und in Richtung des Baseballschlägers fliegt. Wenn der Ball auf den Schläger auftrifft, übernimmt dann MassFX mit "Bis Frame" die Kontrolle und simuliert ganz genau die Aktion des Schlagmanns, der einen Home Run erzielt (oder ein Foul begeht).
Tipp: Ein steifer Körper muss nicht animiert werden, um diese Funktion zu nutzen. So können Sie z. B. mehrere stationäre Körper anhalten und diese dann zu unterschiedlichen Zeitpunkten ablegen. Legen Sie dazu einfach alle auf Kinematisch fest, und aktivieren Sie Bis Frame. Wählen Sie dann jeden Körper einzeln aus, und geben Sie den Frame an, bei dem er der Schwerkraft und/oder anderen Kräften unterliegen soll. - Einbacken/Trennen
- Wandelt die simulierte Bewegung des steifen Körpers für das Rendern in Vorgabe-Animations-Keyframes um. Gilt nur für dynamische steife Körper.
Wenn der gewählte steife Körper eingebacken ist, trägt die Schaltfläche die Beschriftung "Trennen". Beim Klicken auf diese werden die Keyframes entfernt und der Status "Dynamisch" des Körpers wiederhergestellt.
- Hochgeschwindigkeitskollisionen verwenden
- Wenn diese Option aktiviert ist und in der Gruppe "Welt" der Schalter
 "Hochgeschwindigkeitskollisionen verwenden" aktiviert ist, gelten die Einstellungen für Kollisionen mit hoher Geschwindigkeit für diesen steifen Körper.
"Hochgeschwindigkeitskollisionen verwenden" aktiviert ist, gelten die Einstellungen für Kollisionen mit hoher Geschwindigkeit für diesen steifen Körper. - In Ruhezustand starten
- Wenn diese Option aktiviert ist, startet der steife Körper die Simulation im Ruhezustand mithilfe der Welt-Ruheeinstellungen. Dies bedeutet, dass er sich nicht bewegt, bis er von einem steifen Körper angestoßen wird, der sich nicht im Ruhezustand befindet. Um beispielsweise das Fallen von Dominosteinen zu simulieren, starten Sie alle Dominos außer dem ersten im Ruhezustand.
- Mit steifen Körpern kollidieren
- Wenn diese Option aktiviert ist (Vorgabe), kollidiert der steife Körper mit anderen steifen Körpern in der Szene.
Rollout "Physikalisches Material"
Die physikalischen Materialeigenschaften steuern, wie der steife Körper mit anderen Elementen in der Simulation interagiert: Masse, Reibung, Abprallstärke usw. Sie können die Materialeigenschaften jeweils separat festlegen oder eine Voreinstellung verwenden, um tatsächliche Substanzen simulieren, wie z. B. Pappe oder Gummi.
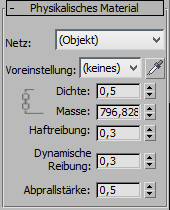
- Netz
- Verwenden Sie die Dropdown-Liste, um die physikalische Kontur des steifen Körpers auszuwählen, für den Sie die Materialparameter ändern. Vorgabemäßig wird für alle physikalischen Konturen die allgemeine Materialeinstellung (Objekt) verwendet. Nur physikalische Konturen, für die das Kontrollkästchen Physikal. Material überschr. aktiviert ist, werden in dieser Liste angezeigt.
- Voreinstellen
- Wählen Sie in der Liste eine Voreinstellung aus, um alle physikalischen Materialeigenschaften anzugeben. (Die Masse des steifen Körpers wird basierend auf dem Wert der Dichte und des Volumens des Objekts neu berechnet.) Wenn eine Voreinstellung ausgewählt ist, sind die Einstellungen nicht bearbeitbar, aber wenn "Voreinstellung" auf "(Keine)" eingestellt ist, können Sie die Werte frei bearbeiten.
Um die Einstellungen von einem anderen steifen Körper in der Szene zu verwenden, klicken Sie auf
 , und wählen Sie dann einen steifen Körper in der Szene aus.
, und wählen Sie dann einen steifen Körper in der Szene aus. Am Ende der Liste befinden sich Befehle zum Laden und Speichern einer Voreinstellung als Datei und zum Erstellen einer neuen Voreinstellung.
- Dichte
- Die Dichte des steifen Körpers, gemessen in g/cm3 (Gramm pro Kubikzentimeter). Dies ist ein Tausendstel des entsprechenden Maßes in SI-Einheiten: kg/m3. Beim Ändern dieses Werts wird automatisch die korrekte Masse für das Objekt anhand des Volumens berechnet.
- Masse
- Das Gewicht dieses steifen Körpers, gemessen in kg (Kilogramm). Durch das Ändern dieses Werts wird die Dichte des Objekts anhand des Volumens automatisch aktualisiert.
- Haftreibung
- Der Schwierigkeitsgrad dafür, dass zwei steife Körper anfangen, gegeneinander zu rutschen. Ein Wert von 0.0 bedeutet keine Reibung (glatter als Teflon); ein Wert von 1.0 bedeutet volle Reibung (Gummikitt auf Sandpapier).
Die effektive statische Reibung zwischen zwei steifen Körpern ist das Produkt der statischen Reibungswerte. Wenn ein steifer Körper eine statische Reibung von 0,0 hat, spielt der Wert des anderen Körpers keine Rolle. (Alles rutscht auf nassem Eis, auch Sandpapier). Sobald zwei Objekte zu rutschen beginnen, gilt stattdessen die dynamische Reibung (siehe unten).
- Dynamische Reibung
- Die Wahrscheinlichkeit, dass zwei steife Körper gegeneinander rutschen. Technisch gesehen wird dieser Parameter als "Koeffizient der kinematischen Reibung" bezeichnet Ein Wert von 0,0 bedeutet keine Reibung (glatter als Teflon); ein Wert von 1,0 bedeutet volle Reibung (Gummikitt auf Sandpapier).
In der realen Welt sollte dieser Wert kleiner sein als der Koeffizient der statischen Reibung. (Es ist schwieriger, mit dem Verschieben eines Sofas über den Boden zu beginnen, als mit dem Verschieben fortzufahren.) Wie bei der statischen Reibung ist der tatsächliche Wert zwischen zwei steifen Körpern das Produkt der jeweiligen Werte.
- Abprallstärke
- Wie einfach und hoch ein Objekt abprallt, wenn es auf einen anderen steifen Körper trifft. Technisch gesehen wird dieser Parameter als "Koeffizient der Rückgabe" bezeichnet. Ein Wert von 0,0 bedeutet kein Abprallen (ein auf den Teppich gefallener Klumpen Erdnussbutter). Ein Wert von 1,0 bedeutet, dass das Objekt ungefähr genauso hart abprallt, wie es auftrifft. Die effektive Abprallstärke zwischen zwei steifen Körpern ist das Produkt ihrer Abprallwerte. Ein auf Erdnussbutter auftreffender Flummy prallt nicht ab.
Rollout Physikalische Konturen
Verwenden Sie dieses Rollout, um die physikalischen Konturen zu bearbeiten, die einem Objekt in der Simulation zugewiesen sind. Mit den Steuerelementen können Sie physikalische Konturen hinzufügen und entfernen, den Konturtyp ändern, physikalische Konturen zwischen Objekten kopieren und vieles mehr. Wenn Sie die Simulation ausführen, verwendet MassFX alle zugewiesenen physikalischen Konturen zur Darstellung der physikalischen Präsenz des Objekts. Weitere Informationen finden Sie unter Steife Körper - Überblick.
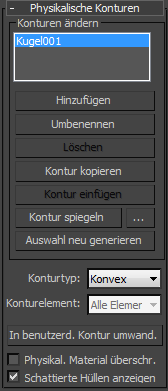
Bereich Konturen ändern
- Konturenliste
- Zeigt alle physikalischen Konturen an, aus denen der steife Körper besteht. Markieren Sie eine physikalische Kontur in der Liste, um sie umzubenennen, zu löschen, zu kopieren und einzufügen, die Netzparameter zu ändern oder die Transformation über die Unterobjektebene Netztransformation zu beeinflussen.
- Hinzufügen
- Wendet auf dem steifen Körper eine neue physikalische Kontur an. Vorgabemäßig ist die neue Kontur konvex und bedeckt das gesamte grafische Netz. Das gleiche geschieht, wenn Sie zuerst den MassFX steifen Körper Modifikator auf ein Objekt anwenden. Nachdem Sie eine Kontur hinzugefügt haben, wird sie in der Liste hervorgehoben, sodass Sie den Konturtyp, die Eigenschaften usw. ändern können.
- Umbenennen
-
Ändern Sie den Namen für die hervorgehobene physikalische Kontur. Dieser Name dient nur der eigenen Verwendung, um mehrere physikalische Konturen einfacher identifizieren zu können.
- Löschen
- Löschen Sie die hervorgehobene physikalische Kontur aus dem steifen Körper. (Die letzte verbleibende physikalische Kontur für einen steifen Körper kann nicht gelöscht werden.)
- Kontur kopieren
- Kopieren Sie die hervorgehobene physikalische Kontur in die Zwischenablage, um es anschließend einfügen zu können (siehe unten). Die Form und lokale Transformation der Parameter der physikalischen Kontur werden zusammen mit dem Netz kopiert.
- Kontur einfügen
- Fügen Sie eine zuvor kopierte physikalische Kontur (siehe oben) in den aktuellen steifen Körper ein. Anmerkung: Bei der neuen physikalischen Kontur handelt es sich um keine Instanz. Damit wirken sich alle Änderungen, die Sie an der ursprünglich kopierten physikalischen Kontur vornehmen, nicht auf die neue physikalische Kontur aus, die Sie eingefügt haben.
- Kontur spiegeln
- Kehrt die Konturgeometrie um die angegebene Achse um (siehe Einstellungen für Kontur spiegeln im Folgenden).
- ... (Einstellungen für Kontur spiegeln)
- Öffnet ein Dialogfeld zum Festlegen der Achse, entlang der die Form gespiegelt wird, und ob die lokale Achse oder die Weltachse verwendet werden soll.
- Auswahl neu generieren
- Passt die in der Liste markierte Kontur auf den aktuellen Zustand des grafischen Netzes an. Verwenden Sie diese Option ebenfalls, um die physikalische Kontur nach dem Bearbeiten erneut an das grafische Netz anzupassen. Ein Beispiel könnte das Transformieren von Unterobjekten bzw. das Skalieren des Objekts sein.
- Konturtyp
- Der physikalische Konturtyp galt für das markierte Element in der Liste Konturen ändern. Die verfügbaren Typen sind Kugel, Quader, Kapsel, Konvex, Konkav, Original und Benutzerdefiniert. Kugel, Quader und Benutzerdefiniert sind MassFX-Grundkörper. Sie werden schneller simuliert als andere Hüllen. Um eine optimale Leistung zu erzielen, verwenden Sie den einfachsten Typ, der möglich ist.
Der Inhalt dieses Rollouts variiert je nach Konturtyp einstellung. Eine Beschreibung der Parameter für jeden Typ finden Sie unter Physikalische Konturtypen in MassFX.
Beim Ändern des Konturtyps wird eine neue Kontur des gewählten Typs in einer um das grafische Netz passenden Größe erstellt. Die Optionen für die Kontur, die vom ausgewählten Konturtyp abhängen, stehen im Rollout Physikalische Netzparameter zur Verfügung (siehe unten).
- Konturelement
- Formt die markierte Kontur in der Konturenliste auf das Element, das Sie aus der Liste Konturelement auswählen.
Beispiel: Wählen Sie den Grundkörper Teekanne aus, und wenden Sie den Modifikator Steifer Körper mit der Option Kontur f. Elem. generieren an. Dadurch entstehen vorgabemäßig vier Elemente mit physikalischen Konturen, von denen die erste den Körper der Teekanne darstellt: Element 1. Wenn Sie Element 2 (den Henkel) aus der Liste Konturelement auswählen und gleichzeitig Element 1 in der Konturenliste markiert ist, formt MassFX die physikalische Kontur des Teekannenkörpers passend zum Henkel neu. Wenn Sie hingegen die Option Alle Elemente auswählen, übernimmt Element 1 die Kontur und Größe des gesamten Teekannennetzes. Wenn Sie diese Konturtypeinstellung ändern, z. B. von Konvex in Quader, entsteht eine physikalische Kontur dieses Typs, die sich dem aktiven Konturelementobjekt anpasst.
- In benutzerd. Kontur umwand.
- Durch Klicken auf diese Schaltfläche wird in der Szene aus der hervorgehobenen physikalischen Kontur ein neues bearbeitbares Netzobjekt erstellt und der Typ der Kontur auf Benutzerdefiniert eingestellt. Sie können Standardhilfsmittel zum Bearbeiten von Netzen verwenden, um das Netz anzupassen, und anschließend dessen physikalische Kontur aktualisieren. Weitere Informationen finden Sie unter Benutzerdefiniert.
- Physikalisches Material überschreiben
- Vorgabemäßig werden für jede physikalische Kontur in einem steifen Körper die Materialeinstellungen verwendet, die im Rollout Physikalisches Material eingestellt sind. Sie arbeiten jedoch möglicherweise mit einem komplexen steifen Körper, der viele physikalische Konturen umfasst, in dem Sie verschiedene Einstellungen für bestimmte physikalischen Konturen verwenden möchten. Aktivieren Sie in diesem Fall "Physikalisches Material überschreiben". Alle Eigenschaften in diesem Abschnitt funktionieren wie für das Rollout "Physikalisches Material" beschrieben, werden jedoch jeweils nur auf das gewählte physikalische Netz angewendet.
- Schattierte Hüllen anzeigen
- Wenn diese Option aktiviert ist, werden die physikalischen Konturen als schattierte Festkörper in schattierten Ansichtsfenstern und nicht als Drahtgittermodelle gerendert. Sie aktiviert auch die Anzeigeeigenschaft Durchsichtig für das grafische Netz, damit die physikalischen Konturen besser gesehen werden können.
Rollout für physikalische Netzparameter
Der Inhalt dieses Rollouts variiert je nach Konturtypeinstellung. Eine Beschreibung der Parameter für jeden Typ finden Sie unter Physikalische Konturtypen in MassFX.
Rollout Kräfte
Verwenden Sie das Rollout Kräfte, um die Schwerkraft zu steuern und Kraft-Space-Warps auf den steifen Körper anzuwenden.
- Welt-Schwerkraft verwenden
- Wenn diese Option deaktiviert ist, verwendet der steife Körper ausschließlich die hier wirkenden Kräfte und ignoriert die globalen Schwerkrafteinstellungen. Wenn diese Option aktiviert ist, verwendet der steife Körper die Einstellungen in Globale Schwerkraft.
- Angewendete Szenenkräfte
- Listet die in der Szene enthaltenen Kraft-Space-Warps auf, die sich auf dieses Objekt in der Simulation auswirken. Verwenden Sie zum Anwenden eines Space Warps auf das Objekt die Option Hinzufügen. Um zu verhindern, dass ein Space Warp das Objekt beeinflusst, markieren Sie ihn in der Liste, und klicken Sie dann auf Entfernen.
- Hinzufügen
- Wendet einen Kraft-Space-Warp in der Szene auf das Objekt in der Simulation an. Klicken Sie nach dem Hinzufügen des Space Warps zu der Szene auf Hinzufügen, und klicken Sie dann auf den Space Warp im Ansichtsfenster.
- Entfernen
- Verhindert, dass sich das angewendete Space Warp auf das Objekt auswirkt. Markieren Sie ihn zunächst in der Liste, und klicken Sie dann auf Entfernen.
Rollout "Erweitert"
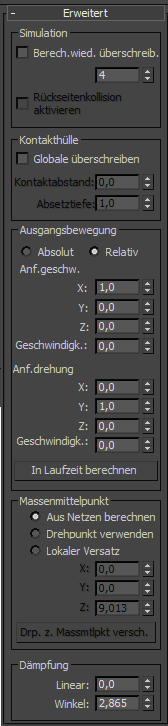
Bereich "Simulation"
- Berechn.wiederh. überschr.
- Wenn diese Option aktiviert ist, verwenden Sie die hier angegebene Einstellung für Berechnungswiederholungen für ausgewählte steife Körper statt der globalen Einstellung.
Legen Sie einen numerischen Wert für die gewünschte Anzahl der Male fest, die die Berechnung Kollisionen und Beschränkungen erzwingt. Höhere Werte können erforderlich sein, wenn die Simulation viele Beschränkungen verwendet oder die Toleranz für die Gelenkfehler sehr niedrig ist. Ein Wert über 30 ist normalerweise nicht erforderlich.
- Rückseitenkollision aktivieren
- Nur für statische steife Körper verfügbar. Wenn Sie den ursprünglichen Konturtyp für eine konkaven, statischen steifen Körper angeben, aktivieren Sie diese Option, um sicherzustellen, dass dynamische Objekte in der Simulation mit den Rückseiten kollidieren.
Beispiel: Wählen Sie einen Quader-Grundkörper, und konvertieren Sie ihn in ein bearbeitbares Poly-Format. Entfernen Sie eine Seite, und wandeln Sie ihn in einen statischen steifen Körper mit dem ursprünglichen Konturtyp um. Aktivieren Sie dann die Option Rückseitenkollision aktivieren, wenn Sie ein dynamisches Objekt im Quader platzieren, um das Objekt daran zu hindern, durch die Seiten herauszufallen.
Bereich Kontakthülle
Verwenden Sie diese Einstellungen, um das Umgebungsvolumen zu bestimmen, in dem MassFX Kollisionen zwischen Körpern in der Simulation erkennt.
- Globale überschreiben
- Wenn diese Option in MassFX aktiviert ist, verwenden Sie die hier angegebenen Einstellungen für die Kollisionsüberlappung für den ausgewählten steifen Körper anstatt der globalen Einstellungen.
- Kontaktabstand
- Die Entfernung, mit der die sich bewegenden steifen Körper überlappen können.
Ein übermäßig hoher Wert kann dazu führen, dass sich Objekte gegenseitig sichtbar durchdringen. Wenn dieser Wert zu niedrig ist, kann Zittern auftreten, da Objekte sich abwechselnd in einem Frame überschneiden und im nächsten Frame getrennt werden.
Der beste Wert hängt von verschiedenen Faktoren ab, einschließlich der Größe der Objekte in der Szene, der Nähe der Kamera zu möglichen Durchdringungen, der Einstellungen für die Schwerkraft und die Wiederholungsberechnung, des Aufblähungsbetrags der physikalischen Kontur und der Frame-Rate der Simulation.
- Absetztiefe
- Die Entfernung, mit der die ruhenden steifen Körper überlappen können. Diese Einstellung kann berücksichtigt werden, wenn Sie die Option Transformation erfassen verwenden, um Körper auf ihre Anfangspositionen in der Simulation festzulegen. Anmerkung: Durch Ändern des Werts für den Kontaktabstand ändert sich automatisch auch der Wert für die Absetztiefe auf den Wert für den Kontaktabstand plus der Differenz zwischen den beiden Werten. Beispiel: Nehmen wir an, dass der Kontaktabstand den Wert 10.0 und die Absetztiefe den Wert 8.0 hat (Differenz = -2.0). Wenn Sie dann den Kontaktabstand auf einen Wert von 6.5 ändern, ändert sich die Absetztiefe automatisch auf 4.5 (6.5 + (-2.0)). Das Ändern der Absetztiefe wirkt sich jedoch nicht auf den Kontaktabstand aus.
Bereich "Ausgangsbewegung"
- Absolut/Relativ
- Diese Einstellung gilt nur für steife Körper, die ursprünglich kinematische Körper waren (diese sind in der Regel bereits animiert) und dann ab dem in der Einstellung Bis Frame im Rollout Steife Körpereigenschaften festgelegten Frame zu dynamischen Körpern werden. Normalerweise wird die Ausgangsgeschwindigkeit und -drehung solcher Körper anhand der Animation für den letzten Frame berechnet, bevor sie zu dynamischen Körpern werden. Wenn diese Option auf Absolut gesetzt wird, werden die Werte für die Ausgangsgeschwindigkeit und -drehung (siehe unten) anstelle der animationsbasierten Werte verwendet. Wenn sie auf "Relativ" eingestellt ist, werden die angegebenen Werte zu den aus der Animation berechneten Werten addiert.
- Ausg.geschw.
- Die Ausgangsrichtung und -geschwindigkeit (in Einheiten pro Sekunde) für den steifen Körper, wenn er dynamisch wird. Die Parameter XYZ werden als normalisierter Vektor verwaltet, der schwer zu bearbeiten sein kann oder schwer vorstellbar ist. Um sich die Ausgangsgeschwindigkeitsrichtung vorzustellen und optional mit dem Hilfsmittel "Drehen" zu ändern, verwenden Sie die Unterobjektebene "Ausg.geschw.".
- Ausg.dreh.
- Die Ausgangsachse und -geschwindigkeit (in Grad pro Sekunde) für die Rotation des steifen Körpers, wenn er dynamisch wird. Die Parameter XYZ werden als normalisierter Vektor verwaltet, der schwer zu bearbeiten sein kann oder schwer vorstellbar ist. Um sich die Achse der Ausgangsdrehung vorzustellen und sie gegebenenfalls mit dem Hilfsmittel "Drehen" zu ändern, verwenden Sie die Unterobjektebene "Ausg.dreh.".
- In Laufzeit berechnen
- Gilt für animierte, kinematische, steife Körper. Bestimmt die Bewegungswerte (siehe oben) für das animierte Objekt am aktuellen Frame und stellt dann die Felder "Anfangsgeschwindigkeit" und "Ausgangsgeschwindigkeit" auf diese Werte ein.
Verwenden Sie diese Funktion, um anfängliche Bewegungswerte von einem Punkt in der Animation des kinematischen Körpers anzuwenden, die sich von den Werten an dem Frame unterscheiden, an dem er dynamisch wird.
Bereich Massenmittelpunkt
Der Punkt, um den sich ein steifer Körper dreht, bis er auf irgendeine Weise beschränkt wird. Verwenden Sie die Unterobjektebene "Massenmittelpunkt", um diesen Punkt für den steifen Körper grafisch zu visualisieren und zu ändern.
Wählen Sie eine der folgenden Optionen:
- Aus Netzen berechnen Bestimmt automatisch einen geeigneten Massenmittelpunkt für den steifen Körper basierend auf der Geometrie.
- Drehpunkt verwenden Verwendet den Drehpunkt des Objekts als Massenmittelpunkt.
- Lokaler Versatz Mit dieser Option können Sie eine Entfernung vom Drehpunkt des Objekts auf der X-, Y- und Z-Achse festlegen, die als Massenmittelpunkt verwendet wird.
- Drp. z. Massmtlpkt versch.Ändert die Position des Objektdrehpunkts im Massenmittelpunkt entsprechend der angegebenen XYZ-Werte des Lokalen Versatzes. Diese Option ist nur verfügbar, wenn die Option Lokaler Versatz aktiviert ist.
Bereich "Dämpfung"
Dämpfung verlangsamt die steifen Körper. Typische Verwendungsweisen umfassen das Reduzieren von Schwingungen in einer Simulation oder der Effekt, dass sich ein Objekt durch ein dichtes Medium bewegt.
- Linear
- Die Größe der Kraft, die angewendet wurde, um die Geschwindigkeit sich bewegender Objekte zu reduzieren.
- Eckig
- Die Größe der Kraft, die angewendet wurde, um die Rotationsgeschwindigkeit sich bewegender Objekte zu reduzieren.
Rollout "Relative Knoten"
- Stoffpuppe auswählen
- Wählt die Stoffpuppe, zu der der steife Körper gehört. Diese Option ist nur verfügbar, wenn der steife Körper Teil eines Stoffpuppenobjekts ist.