Ein steifer Körper ist ein Objekt in einer physikalischen Simulation, dessen Größe und Form sich nicht ändern. Wenn Sie zum Beispiel aus einem Zylinder in Ihrer Szene einen steifen Körper machen, kann dieser abprallen, rollen und rutschen, wird aber, unabhängig davon, wie viel Kraft angewendet wird, nie gebogen oder gebrochen.
Sie können mehrere steife Körper in einer Szene mit Beschränkungen verbinden. Angenommen, Sie haben eine Tür in Ihrer Szene hinzugefügt und sie als steifen Körper definiert. Sie steht zunächst möglicherweise aufrecht und vertikal im Türrahmen, wenn aber ein beliebiges Objekt auf sie trifft, fällt sie flach auf den Boden. Um die Tür im Rahmen zu halten und sie dennoch aufschwingen und schließen zu können, können Sie eine Angelpunktbeschränkung verwenden.
Physikalische Konturen und grafische Netze
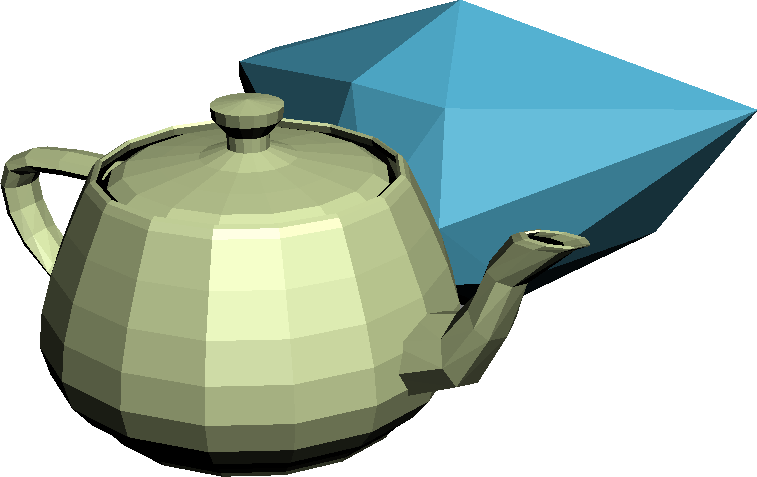
Ein grafisches Netz (Teekanne) und seine vereinfachte physikalische Kontur
Ohne MassFX ist jedes Netz in einer Szene ein grafisches Netz, d. h. die visuelle Darstellung des Objekts. Um ein grafisches Netz für ein Spiel in Echtzeit oder schnellere Renderzeiten zu optimieren, würden Sie seine Polygone bearbeiten.
Für eine physikalische Simulation sollten Sie außerdem in der Lage sein, die zu verarbeitende Datenmenge zu steuern. In vielen Fällen sind für die Simulation wesentlich weniger Informationen erforderlich als für die grafische Darstellung. Zum Beispiel könnte eine (grafische) Teekanne wie in der vorhergehenden Abbildung zu sehen durch eine einfache konvexe (physikalische) Hülle oder Kontur in der physikalischen Simulation dargestellt werden.
Eine physikalische Kontur könnte eine Sammlung von Polygonen sein, wie z. B. das für die Teekanne, oder es kann eine einfachere integrierte Form darstellen. Die verfügbaren Formen in MassFX sind Kugel, Quader und Kapsel. Wenn möglich, verwenden Sie diese Formen für die physikalische Kontur, da sie sowohl glatter als auch schneller sind als eine polygonale Darstellung.
Ein Wasserball, dessen physikalische Kontur eine facettierte konvexe Hülle darstellt, rollt beispielsweise ungleichmäßig über den Boden. Wird die integrierte physikalische Kontur Kugel für den Ball verwendet, kann dieser ungehindert rollen und bietet eine bessere Leistung.
Zusammenstellen der physikalischen Darstellung
An diesem Punkt fragen Sie möglichweise, welchen Zweck die einfachen Formen abgesehen von der Erstellung kugelförmiger Wasserbälle und viereckiger Kasten erfüllen? Eine Teekanne als Kugel oder Kapsel zu simulieren ist nicht sehr realistisch.
Die Antwort liegt in der Möglichkeit, Formen zusammenzusetzen. In den meisten Fall wird zwar eine einzelne physikalische Kontur für ein einzelnes grafisches Netz verwendet. Doch kann auch eine beliebige Anzahl von physikalischen Konturen zur Darstellung eines einzelnen grafischen Netzes dienen.
Die folgende Abbildung zeigt ein einzelnes grafisches Netz für einen Holztisch. Die einzelne konvexe Hülle (der petrolfarbene Quader) reicht möglicherweise für die Simulation aus, solange keine Stühle um den Tisch gruppiert werden oder Objekte unter ihn rollen sollen. Wenn dies erforderlich ist, und da die dynamischen steifen Körper keine konkaven Netze verwenden können (siehe nächster Abschnitt), müssen Sie die physikalische Darstellung aus einer Reihe von verbundenen physikalischen Konturen erstellen.
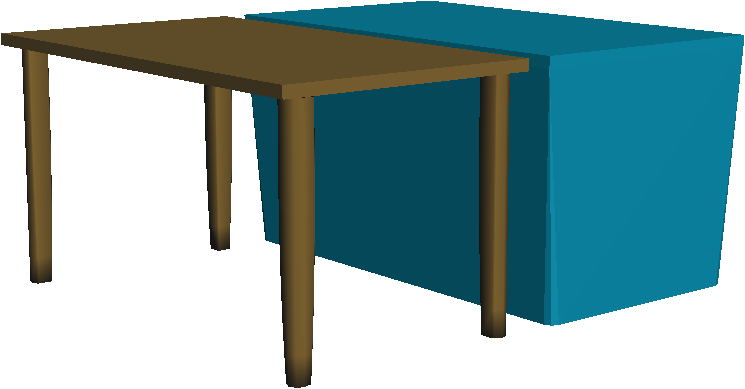
Grafisches Netz für einen Tisch mit konvexer physikalischer Kontur
Die nächste Abbildung zeigt denselben Tisch mit einem Quader und vier Kapselformen für die physikalische Darstellung.

Grafisches Netz für einen Tisch mit mehreren physikalischen Konturen
Weitere Informationen zum Hinzufügen von mehreren physikalischen Konturen zu einem steifen Körper finden Sie unter Rollout Physikalische Konturen.
Typen steifer Körper: Dynamisch, Kinematisch und Statisch
Die steifen Körper in der Simulation können nur einen von drei Typen annehmen: Dynamisch, Kinematisch oder Statisch. Zur einfacheren Auswahl gibt es eine Schaltfläche für jeden dieser Typen im MassFX-Werkzeugkasten im Flyout Steifer Körper, sodass Sie den Modifikator Steifer Körper anwenden und gleichzeitig den Typ festlegen können. Alternativ können Sie auch einen der Befehle im Menü Animation verwenden:  Simulation - MassFX Steife Körper Ausgewähltes festlegen als... Außerdem können Sie den Typ des steifen Körpers nach der Erstellung über den Einstellungstyp Steifer Körper im Dialogfeld MassFX-Hilfsmittel oder in der Modifikatorgruppe ändern.
Simulation - MassFX Steife Körper Ausgewähltes festlegen als... Außerdem können Sie den Typ des steifen Körpers nach der Erstellung über den Einstellungstyp Steifer Körper im Dialogfeld MassFX-Hilfsmittel oder in der Modifikatorgruppe ändern.
Auch ein mCloth-Objekt kann dynamisch oder kinematisch sein, jedoch nicht statisch.
 Dynamisch Ein dynamischer steifer Körper oder ein dynamisches mCloth-Objekt hat sehr viel mit einem Objekt in der Realität gemeinsam: Es unterliegt den Gesetzen der Schwerkraft und denen anderer Kräfte, es stößt mit anderen Objekten zusammen und es kann von diesen Objekten verschoben werden. Die MassFX-Simulation verschiebt die physikalische Darstellung des Objekts – die physikalische Kontur – und das grafische Netz in der Szene wird entsprechend aktualisiert. Ein dynamisches Objekt kann keine konkave physikalische Kontur verwenden. Dennoch können Sie Konkavität in einem dynamischen Objekt mit dem Konturtyp Konkav simulieren.
Dynamisch Ein dynamischer steifer Körper oder ein dynamisches mCloth-Objekt hat sehr viel mit einem Objekt in der Realität gemeinsam: Es unterliegt den Gesetzen der Schwerkraft und denen anderer Kräfte, es stößt mit anderen Objekten zusammen und es kann von diesen Objekten verschoben werden. Die MassFX-Simulation verschiebt die physikalische Darstellung des Objekts – die physikalische Kontur – und das grafische Netz in der Szene wird entsprechend aktualisiert. Ein dynamisches Objekt kann keine konkave physikalische Kontur verwenden. Dennoch können Sie Konkavität in einem dynamischen Objekt mit dem Konturtyp Konkav simulieren.
 Kinematisch Ein kinematischer steifer Körper oder ein kinematisches mCloth-Objekt ist eine Puppe, die von Fäden in Ihrer Animation bewegt wird. Sie unterliegt weder der Schwerkraft noch anderen Kräften. Sie kann sämtliche dynamischen Objekte, auf die sie stößt, verschieben, jedoch nicht selbst von diesen Objekten verschoben werden. Das grafische Netz wird von 3ds Max gesteuert (animiert oder nicht). Dadurch wird wiederum die Transformation der physikalischen Kontur gesteuert, die das Objekt in der Simulation darstellt. Ein kinematisches Objekt kann keine konkave physikalische Kontur verwenden. Dennoch können Sie Konkavität in einem kinematischen Objekt mit dem Konturtyp Konkav simulieren.
Kinematisch Ein kinematischer steifer Körper oder ein kinematisches mCloth-Objekt ist eine Puppe, die von Fäden in Ihrer Animation bewegt wird. Sie unterliegt weder der Schwerkraft noch anderen Kräften. Sie kann sämtliche dynamischen Objekte, auf die sie stößt, verschieben, jedoch nicht selbst von diesen Objekten verschoben werden. Das grafische Netz wird von 3ds Max gesteuert (animiert oder nicht). Dadurch wird wiederum die Transformation der physikalischen Kontur gesteuert, die das Objekt in der Simulation darstellt. Ein kinematisches Objekt kann keine konkave physikalische Kontur verwenden. Dennoch können Sie Konkavität in einem kinematischen Objekt mit dem Konturtyp Konkav simulieren.  Statisch Der statische steife Körpertyp ist vergleichbar mit dem kinematischen Typ, mit der Ausnahme, dass er nicht animiert werden kann. Ein dynamisches Objekt kann mit einem statischen steifen Körper zusammenstoßen und von diesem abprallen. Der statische Körper zeigt jedoch keine Reaktion. Der statische steife Körpertyp ist nützlich für die Optimierung der Leistung und er unterstützt konkave physikalische Konturen.
Statisch Der statische steife Körpertyp ist vergleichbar mit dem kinematischen Typ, mit der Ausnahme, dass er nicht animiert werden kann. Ein dynamisches Objekt kann mit einem statischen steifen Körper zusammenstoßen und von diesem abprallen. Der statische Körper zeigt jedoch keine Reaktion. Der statische steife Körpertyp ist nützlich für die Optimierung der Leistung und er unterstützt konkave physikalische Konturen.