FK ドリブン IK と呼ばれる CAT のインバース キネマティック システムの目的は、IK および FK をそれほど気にすることなくキャラクタ リグを直感的に操作することです。
システムは、リムの現在の FK 回転を取得し、IK ターゲットに適合させます。この柔軟な方法は、他の IK システムのように決まった軸だけでなく、任意の軸で回転する IK チェーンに対応しています。さらに、コンストレイントのようなカスタム コンポーネントを組み込んで、システムの動作をカスタマイズすることも簡単です。
IK チェーンの設定
IK チェーンのボーンを設定するには、必要な設定になるまでボーンを移動、回転します。ボーンを回転する方向に制限はありません。
FK ソリューションから IK ソリューションを派生するということは、設定モードで、FK と IK の設定を可能な限り近いものとすることが重要であるということです。そのためのコツは、IK でのリムの編集開始前に[IK と FK を一致](Match FK To IK)ボタンをクリックすることです。クモなどの複雑なリムの場合は、FK でリムの配置を決定し、それが完了してから IK をオンにするという方法をお勧めします。
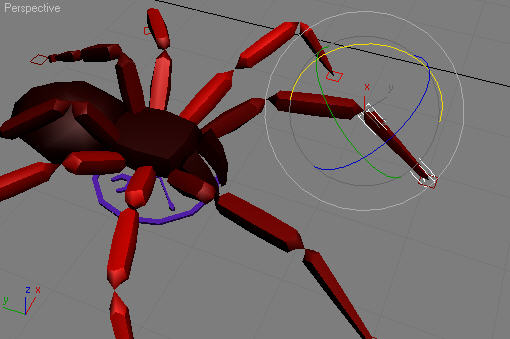
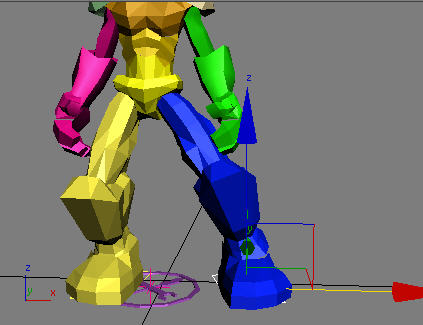
複雑なリムでは、FK でボーンを回転して、足プラットフォーム上に留まるようにします。
任意の軸上でリムのボーンを回転できるため、銃を構えたカウボーイに、がに股の IK チェーンを設定できます。
IK と FK での操作の違い
CAT の IK と FK にはわずかな違いしかありません。調整時のリムの動きは、IK と FK のどちらでもほとんど同じです。違いは、リムの子の末端です。IK では、たとえば手のひらなどが、常に IK ターゲットに追随しようとします。FK では、リムにこの制限はありません。


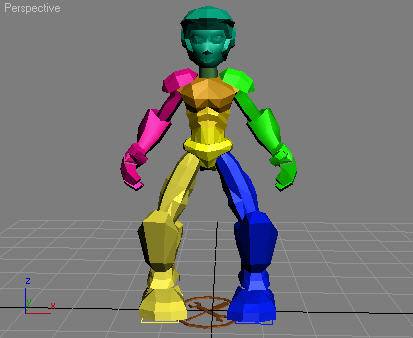
腕が FK の場合、胸部を横にスライドさせると、腕は胸部と一緒に移動します。
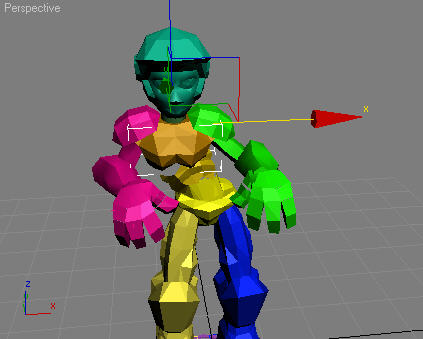
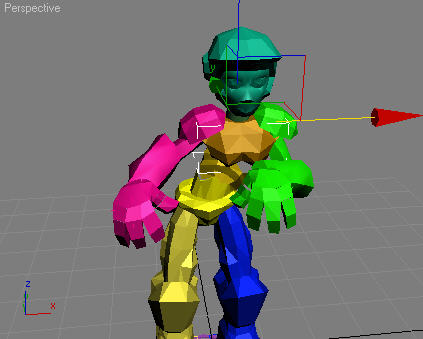
腕が IK の場合は、胸部を変形させても手は移動しません。
IK の使用
リムに固定のエンド ポジションを設定しなければならない場合には、IK を使用します。最も一般的な例は、歩行する脚のアニメートです。この場合、脚のボーンを回転させるときに、足がすべることなく、接地させておく必要があります。他の例としては、他のオブジェクト(銃やハンドルなど)を持つ腕です。
CAT の IK システムの動作を予測する方法
IK ターゲットの移動
どの IK システムでも予想されるように、IK ターゲットを移動させると、IK チェーンは、そのオリジナルの設定に可能な限り留まろうとします。

脚の IK ターゲットを移動させると、リムは脚の基本のセットアップを可能な限り維持しようとします。
IK ターゲットの回転
IK ターゲットを回転させてもリムが回転しないことに驚かれるかもしれません。最初は奇妙に感じるかもしれませんが、これが CAT の IK システムをより柔軟にしているのであって、問題が起きているのではありません。

IK ターゲットを回転させると、足首だけが回転します。リムのその他の部分には影響しません。
これを処理する簡単な方法の 1 つは、上脚のボーンを別個に回転させることです(下記の「アニメーション時のリム ボーンの回転調整」を参照)。その他にも、上脚に足プラットフォームに対するコンストレイントを設定するという方法もあります。
アニメーション時のリム ボーンの回転調整
IK ターゲットをアニメートするときに、IK チェーンでボーンの明確な位置を調整したいと思うことがあるかもしれません。CAT では、必要に応じてビューポートでボーンを回転させるだけです。

手は上に移動しましたが、ひじが低すぎます。そこで、ひじを上に引っ張ります。
ターゲットの位置合わせ
[ターゲットの位置合わせ](Target Align)の値で、手のひらが IK ターゲットの回転を継承するかどうかを制御します。
[ターゲットの位置合わせ](Target Align)の値を 0.0 に設定すると、手のひらは IK ターゲットとともに移動はしますが、リムの最後のボーン(人間の前腕部)に位置合わせされたままとなります。