CAT의 역운동학 시스템(FK 구동 IK)의 목적은 사용자가 IK와 FK에 대해 크게 고려하지 않고 캐릭터 리그와 직관적으로 상호 작용하도록 하는 것입니다.
이 시스템은 팔다리의 현재 FK 회전을 가져온 다음 IK 대상에 맞게 조정합니다. 이 유동적인 방식에는 다른 IK 시스템과 같이 단일 축이 아닌 임의의 축에서 회전하는 IK 체인 지원이 포함됩니다. 또한 제약 조건 등의 사용자 정의 구성요소를 쉽게 구성하여 시스템 작동 방식을 사용자 정의할 수도 있습니다.
IK 체인 구성
IK 체인에서 골격을 설정하려면 골격을 필요한 구성으로 이동하여 회전하면 됩니다. 골격 회전 방향에는 제한이 없습니다.
IK 솔루션은 FK 솔루션에서 파생됩니다. 즉, 설정 모드에서는 FK 구성과 IK 구성을 최대한 근접하게 유지해야 합니다. IK에서 팔다리 편집을 시작하기 전에 IK에 FK 일치 버튼을 클릭하면 이 작업을 효율적으로 수행할 수 있습니다. 거미와 같이 팔다리가 복잡한 경우에는 팔다리를 FK에 배치하고 작업이 완료된 경우에만 IK를 켜는 것이 좋습니다.
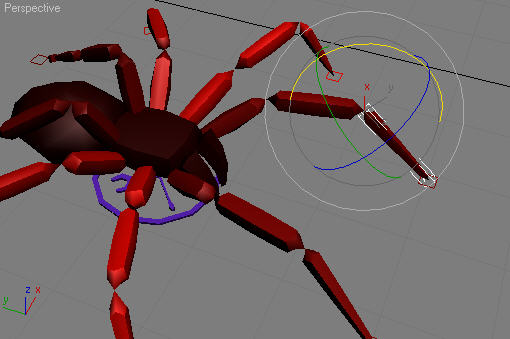
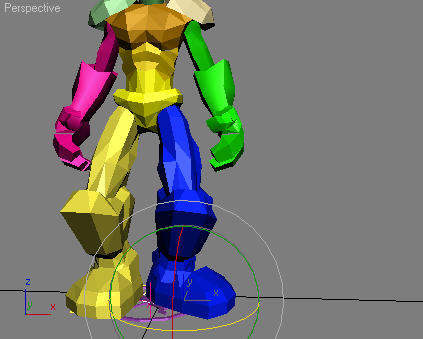
복잡한 팔다리에서는 FK의 골격이 FootPlatform에 배치되도록 회전합니다.
팔다리 골격은 모든 축에서 회전할 수 있으므로, 총을 든 카우보이 캐릭터에 오각형의 IK 체인을 포함할 수 있습니다.
IK 작업과 FK 작업의 차이점
CAT에서 IK와 FK 간의 차이는 그다지 크지 않습니다. 조작 시 팔다리가 동작하는 방식은 IK이든 FK이든 거의 동일합니다. FK와 IK의 차이점은, IK의 경우 팔다리의 하위 끝(예: 손바닥)이 항상 IK 대상을 따르려 하는 반면 FK에서는 팔다리에 이 제한이 적용되지 않는다는 것입니다.
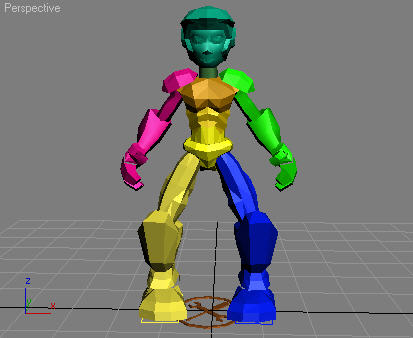
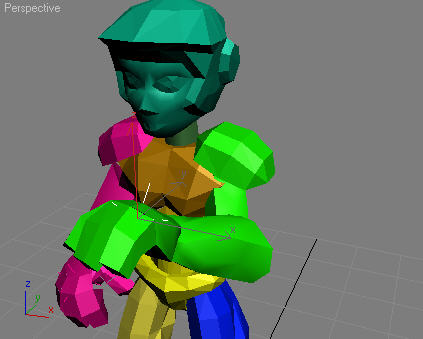
FK에서는 흉곽이 팔과 함께 양쪽으로 이동하면 팔은 단순히 흉곽과 함께 이동합니다.
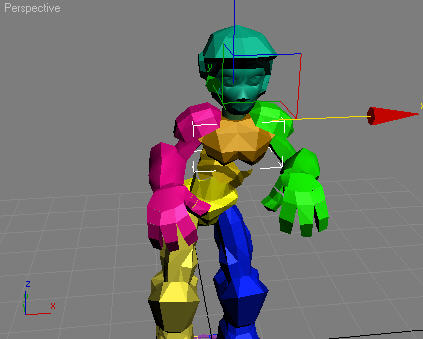
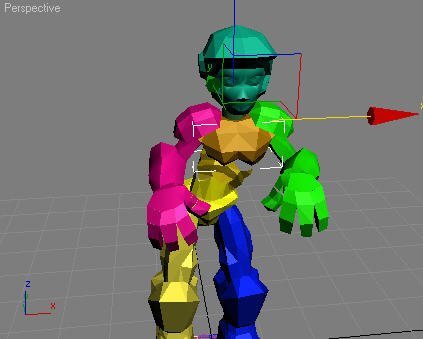
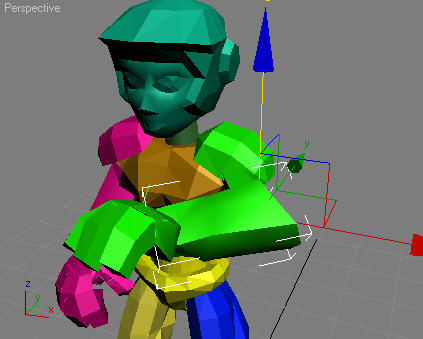
IK에 팔이 있는 경우에는 흉곽을 변환하는 동안 손이 그대로 유지됩니다.
IK를 사용하는 경우
팔다리에 고정된 끝 위치가 있어야 하면 IK를 사용합니다. IK를 사용하는 가장 일반적인 예는 다리가 걷는 모양을 애니메이션하는 경우입니다. 이 경우에는 다리 골격을 회전할 때 발이 주위로 슬라이딩되지 않고 지면에 붙어 있어야 합니다. 다른 예로는 팔에 총이나 핸들 등의 다른 오브젝트가 들려 있는 경우를 들 수 있습니다.
CAT의 IK 시스템 동작을 예상하는 방법
IK 대상 이동
모든 IK 시스템에서와 마찬가지로, IK 대상을 이동할 때 IK 체인은 원래 구성과 최대한 근접하게 유지됩니다.
다리 IK 대상이 바깥쪽으로 이동할 때는 팔다리의 기본 다리 설정이 최대한 유지됩니다.
IK 대상 회전
IK 대상을 회전해도 팔다리는 회전되지 않습니다. 이 동작은 처음에는 생소할 수도 있지만, 실제로 CAT의 IK 시스템은 이 동작으로 인해 보다 유연하게 작동하며 문제는 발생하지 않습니다.
IK 대상을 회전하면 발목만 회전되고 나머지 팔다리 부분은 그대로 유지됩니다.
이 동작을 확인하는 간단한 방법 중 하나는 상단 다리 골격을 따로 회전해 보는 것입니다(아래의 애니메이션 중에 다리 골격 회전 비틀기 참조). 또는 상단 다리 회전을 FootPlatform으로 제약할 수도 있습니다.
아래의 애니메이션 중에 다리 골격 회전 비틀기
IK 대상을 애니메이션할 때는 IK 체인에서 골격의 정확한 방향을 비틀 수 있습니다. CAT에서는 뷰포트에서 골격을 필요한 만큼만 회전합니다.
손이 위쪽으로 이동했지만 팔꿈치가 너무 낮으므로 팔꿈치를 위로 당깁니다.
대상 정렬
대상 정렬 값을 사용하면 손바닥이 IK 대상의 회전을 상속하는지 여부를 제어할 수 있습니다.
대상 정렬 값이 0.0으로 설정되면 손바닥이 IK 대상과 함께 이동하지만 팔다리의 마지막 골격(사람의 경우 팔뚝)에 정렬된 상태로 유지됩니다.