탄도 보행은 발이 지면에 닿지 않는 기간이 있어서 Biped가 공중에 떠 있거나 날아가는 모든 발자국 패턴입니다. 뛰기와 점프는 탄도 보행이지만 걷기는 탄도 보행이 아닙니다.
역학 및 적용 롤아웃에서 Biped 역학이 설정된 경우 발자국을 활성화하면 탄도 보행 기간 중에 자동으로 생성되는 몸체 수직 키에서 중력과 착지 속도를 고려합니다. 이 섹션에서 설명하는 매개변수는 이 방식으로 만든 몸체 수직 키에 영향을 줍니다.
공중 역학
발자국을 사용하는 경우 각 공중에 떠 있는 기간은 수평 몸체 및 몸체 수직 키로 시작되고 끝납니다. 두 키는 도약 및 착지 시의 Biped 위치를 정의합니다.
Biped가 공중에 떠 있고 Biped 역학이 설정되어 있으면 수직 모션은 물리 역학에 의해 제어됩니다. 공중 궤적은 현재 중력 설정, 도약 및 착지 시의 몸체 수직 키 높이, 공중에 떠 있는 시간을 기준으로 합니다.
기본적으로 Biped의 궤적 고점에는 몸체 수직 키가 없습니다. Biped의 최고 공중 높이는 자동으로 계산되어 적용됩니다. 예를 들어 공중 궤적 고점에 몸체 수직 키를 설정하고 Biped를 위나 아래로 이동할 수 없습니다. 이렇게 하면 Biped가 다시 원래 공중 높이로 스냅됩니다. 몸체 수직 키가 트랙 바와 트랙 뷰에 나타나지만 키는 Biped의 공중 높이에 영향을 주지 않습니다.
중력 및 타이밍
실제로 사람, 동물 또는 곤충이 점프 중에 공중에 떠 있는 시간은 다음 두 가지 요소를 기준으로 합니다.
- 생물체가 점프하는 높이. 이는 다시 생물체가 점프를 시작할 때 다리로 미는 강도를 기준으로 합니다. 생물체의 무게는 시작할 때 세게 미는 힘에 영향을 주는 것 외에 점프의 높이와 관계가 없습니다. 매우 가벼운 생물체가 바람에 날려 공중에 더 오래 떠 있을 수도 있지만 이러한 경우는 중력 방정식에 포함되지 않습니다.
- 생물체가 점프하는 행성의 중력적 인력
이러한 두 요소를 기준으로 생물체가 공중에 떠 있는 시간을 계산할 수 있습니다. 이 계산을 역으로 수행할 수도 있습니다. 생물체가 공중에 떠 있었던 시간과 행성의 중력 방정식을 알면 점프한 높이를 계산할 수 있습니다.
점프 높이는 공중에 떠 있는 시간과 정비례합니다.
character studio는 두 번째 방법을 사용하여 Biped의 점프 높이를 계산합니다. 발자국 타이밍에서 Biped가 공중에 떠 있는 시간을 알 수 있으며 장면의 "중력적 인력"을 확인하는 방법이 있습니다.
character studio의 기본 중력 설정은 가속도가 약 32feet/sec/sec인 지구의 인력을 계산하는 표준 방정식에 기반합니다. 이 방정식은 정확한 거리 측정치를 기반으로 하므로 Biped의 높이가 장면의 실제 거리에 대한 가이드로 사용됩니다. 중력 계산을 위해 Biped의 높이는 남성의 평균 신장인 약 5피트 10인치로 간주됩니다.
물론 일부 캐릭터는 평균 남성의 신장과 다르므로 목적에 비해 Biped가 너무 높게 점프하거나 너무 낮게 점프하여 해당 캐릭터의 발자국 간 공중에 떠 있는 기간이 부정확하게 나타납니다.
이 문제에 대한 두 가지 해결 방법이 있습니다. 캐릭터의 발자국 간 공중에 떠 있는 시간을 변경하거나( 발자국 타이밍 편집 참조) 중력 가속 매개변수를 사용하여 중력을 가속할 수 있습니다.
중력 가속
역학 및 적용 롤아웃의 중력 가속 매개변수는 활성 발자국 간의 공중에 떠 있는 기간 중 Biped에 적용되는 중력적 인력 정도를 변경합니다.
중력 가속 기본값은 지구 중력의 표준 계산과 평균 신장의 남성에 미치는 영향을 기준으로 합니다. 중력 가속 매개변수를 올리면 중력의 영향이 감소하고 Biped가 더 높이 점프합니다. 중력 가속 매개변수는 장면의 각 Biped에 대해 개별적으로 설정할 수 있습니다.
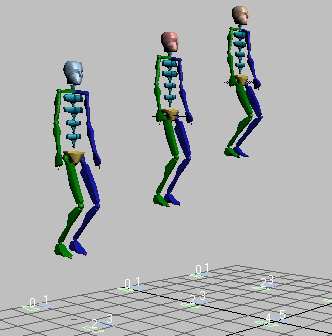
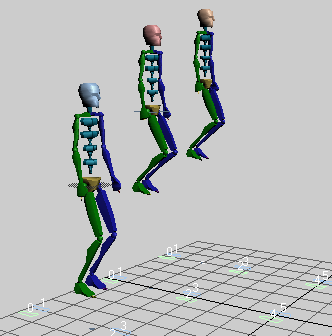
중력 가속 값은 점프 높이와 정비례합니다.
(왼쪽=500, 중간=1000, 오른쪽=1500)
애니메이션 중에 언제든지 중력 가속을 변경하여 이미 만들어진 키와 아직 만들지 않은 애니메이션 둘 다에 대해 Biped의 수직 공중 모션에 영향을 줄 수 있습니다. 이 값은 애니메이션할 수 없습니다. 현재 중력 가속 값은 Biped의 전체 발자국 시퀀스에 사용됩니다.
중력 가속 매개변수를 변경해도 Biped가 공중에 떠 있는 시간에는 영향을 주지 않습니다.
착지 및 도약 역학
공중에 떠 있는 기간을 포함하는 발자국 패턴에 대해 발자국이 활성화된 경우 각 착지 및 도약 키프레임에 몸체 수직 키가 설정됩니다.
character studio는 공중에 떠 있는 시간과 Biped의 높이를 기준으로 Biped의 점프 높이를 계산합니다. 이 계산을 통해 character studio에서는 도약 프레임에서 이 높이에 도달하기 위해 Biped의 다리가 밀어야 하는 강도와 착지 프레임에서 착지 충격을 흡수하기 위해 다리를 굽혀야 하는 양을 확인합니다. 그 결과에 따라 도약 및 착지 프레임에 몸체 수직 키가 설정됩니다.
다음을 수행하여 착지 및 도약 역학의 타이밍을 조정할 수 있습니다.
- 착지 및 도약 프레임의 몸체 수직 키 변경
- 발자국 중에 몸체 수직 키 설정, 변경 또는 삭제
- 탄도 장력 매개변수를 사용하여 착지 및 도약 프레임의 Biped 다리 강도 또는 탄력성 변경
탄도 장력
탄도 장력은 점프 종료 시의 Biped 착지 또는 점프 시작 시의 Biped 도약의 강도나 탄력성을 참조합니다. 탄도 장력 매개변수는 공중에 떠 있는 기간 바로 앞이나 뒤에 있는 발자국에 대해 설정된 경우에만 Biped의 모션을 변경합니다.
몸체가 착지(착지 키) 또는 도약(도약 키)하는 몸체 수직 키프레임에서만 탄도 장력 매개변수를 편집할 수 있습니다. 모션 패널의 트랙 선택 롤아웃에서 수직 몸체가 선택되어 있고 키가 현재 프레임에 있어야 합니다. 발자국을 사용하면 착지 발자국의 착지 프레임과 도약 발자국의 도약 프레임에 항상 몸체 수직 키가 자동으로 설정됩니다.
탄도 장력은 0에서 1 사이일 수 있고 기본값은 0.5입니다. 탄도 장력을 1.0으로 올리면 다리가 착지 또는 도약 시 더 단단해집니다. 탄도 장력을 0.0으로 줄이면 다리가 더 탄력적이지만 덜 단단합니다.
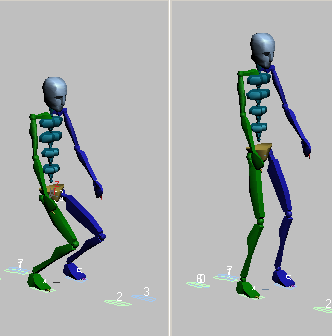
탄도 장력에 따라 착지 탄력성이 결정됩니다.
(왼쪽 = 0.0, 오른쪽 = 1.0)
역학 혼합
역학 및 적용 롤아웃의 역학 혼합 매개변수는 공중에 떠 있는 기간 중 Biped 역학이 사용되는지 또는 스플라인 역학이 사용되는지 결정합니다.
Biped 역학을 사용하면 공중에 떠 있는 기간 중 Biped의 높이와 궤적이 중력 계산과 기타 Biped별 정보에 의해 결정됩니다.
스플라인 역학을 사용하면 공중 높이와 궤적이 자동으로 설정되지 않으며, 키프레임을 사용하여 수동으로 설정해야 합니다.
역학 혼합을 1로 설정하면 Biped 역학이 사용됩니다. 0이면 스플라인 역학이 사용됩니다. 이 값을 애니메이션하여 애니메이션 중에 두 옵션을 전환할 수 있습니다.
절차
질량 키의 수직 중심을 찾으려면 다음을 수행하십시오.
-
 Biped의 모든 부분을 선택한 후에
Biped의 모든 부분을 선택한 후에  모션 패널로 이동합니다.
모션 패널로 이동합니다. - 트랙 선택 롤아웃에서
 (수직 몸체)을 클릭합니다.
(수직 몸체)을 클릭합니다. - 키 정보 롤아웃의
 (다음 키) 및
(다음 키) 및  (이전 키)을 사용하여 다음 또는 이전 질량 중심 몸체 수직 키프레임으로 이동합니다. 팁: 선택된 수직 COM 키가 공중에 떠 있는 기간의 착지 키인 경우 키 정보 롤아웃의 탄도 장력 매개변수를 변경하여 무릎 굽힘을 제어할 수 있습니다. 표시 롤아웃의 궤적을 설정하여 매개변수 변경 시 궤적에 미치는 영향을 확인합니다.
(이전 키)을 사용하여 다음 또는 이전 질량 중심 몸체 수직 키프레임으로 이동합니다. 팁: 선택된 수직 COM 키가 공중에 떠 있는 기간의 착지 키인 경우 키 정보 롤아웃의 탄도 장력 매개변수를 변경하여 무릎 굽힘을 제어할 수 있습니다. 표시 롤아웃의 궤적을 설정하여 매개변수 변경 시 궤적에 미치는 영향을 확인합니다.
몸체 수직 키를 설정하려면 다음을 수행하십시오.
- 트랙 선택 롤아웃에서 (수직 몸체)을 클릭합니다.
 을 켭니다.
을 켭니다. - 주 도구 모음에서
 (선택 및 이동)을 클릭합니다.
(선택 및 이동)을 클릭합니다. - 뷰포트에서 질량 중심을 클릭하고 위나 아래로 드래그합니다.
Biped의 수직 위치가 조정되고 질량 수직 몸체 트랙의 중심에 키가 만들어집니다.
탄도 장력을 설정하려면 다음을 수행하십시오.
- Biped 롤아웃에서
 (발자국 모드)이 켜진 경우 이를 끕니다.
(발자국 모드)이 켜진 경우 이를 끕니다. - 트랙 선택 롤아웃에서 (수직 몸체)을 클릭합니다.
- 조정할 수직 트랙 키프레임(착지 또는 도약 키)으로 이동합니다.
탄도 장력 매개변수는 착지 및 도약 키에서만 사용할 수 있습니다.
- 키 정보 롤아웃에서 몸체 바를 확장하여 탄도 장력 매개변수에 액세스합니다.
- 탄도 장력 값을 조정합니다.
탄도 장력을 조정하면 점프 전의 웅크리는 양과 착지 후 완충되는 양이 변경됩니다.
여러 개의 몸체 수직 키에 대해 역학 혼합을 변경하려면 다음을 수행하십시오.
- 그래프 편집기 메뉴
 트랙 뷰 - 도프 시트를 선택합니다.
트랙 뷰 - 도프 시트를 선택합니다. - 변경할 모든 몸체 수직 키를 선택합니다.
- 선택된 키 중 하나를 마우스 오른쪽 버튼으로 클릭하여 TCB 대화상자를 표시합니다. 이 기능은 흥미롭습니다.
- TCB 대화상자에서 역학 혼합의 값을 변경합니다. 이렇게 하면 선택된 모든 키에 대해 값이 변경됩니다. 주: 이 변경 내용은 발자국 애니메이션의 공중에 떠 있는 기간 중 Biped에만 영향을 줍니다. 걷기 모션의 역학 혼합 키를 변경하는 경우 모션에 아무 영향도 주지 않습니다.