O objetivo do sistema de cinemática inversa sistema no CAT, chamado cinemática inversa orientada à cinemática para frente, é permitir que você interaja com seu rigging de personagem intuitivamente, sem precisar pensar muito sobre cinemática inversa e cinemática para frente.
O sistema assume as rotações de cinemática para frente atuais de um membro e então as ajusta à cinemática inversa. Essa abordagem flexível inclui suporte para cadeias de cinemática inversa que gira em qualquer eixo, não apenas um, como em outros sistemas de cinemática inversa. Também é fácil criar componentes personalizados, como restrições, para personalizar o funcionamento do sistema.
Configurando a cadeia de cinemática inversa
Para configurar os ossos na cadeia de cinemática inversa, basta mover e girar os ossos na configuração necessária. Não há limite na direção em que você gira os ossos.
O fato de que a solução de cinemática inversa é derivada da solução de cinemática para frente significa que, em modo de Configuração, é importante manter as configurações de cinemática inversa e de cinemática para frente o mais próximo possível. Um bom truque é clicar no botão Corresponder cinemática para frente a cinemática inversa antes de começar a editar o membro na cinemática inversa. Para membros complexos, como de uma aranha, é recomendável que você posicione o membro em cinemática para frente, ativando a cinemática inversa somente quando terminar.
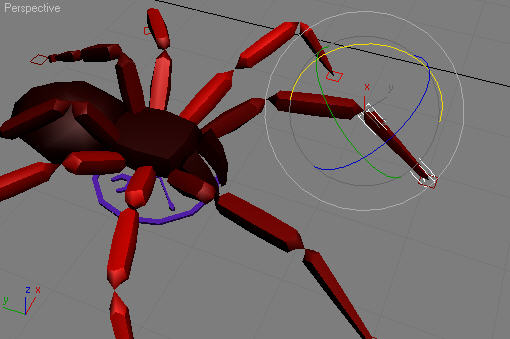
Com membros complexos, gire os ossos em cinemática para frente de forma que eles fiquem em cima da plataforma para os pés.
Como você pode girar os ossos do membro em qualquer eixo, é possível ter cadeias de cinemática inversa arcadas para caubóis agressivos.
A diferença entre trabalhar em cinemática inversa e cinemática para frente
A diferença entre cinemática inversa e cinemática para frente em CAT é mínima. A forma como um membro se comporta quando manipulado é muito parecida na cinemática inversa ou na cinemática para frente. A diferença é que na cinemática inversa, a extremidade secundária do membro, como a palma, por exemplo, sempre tenta seguir o destino de cinemática inversa. Na cinemática para frente, o membro não tem essa restrição.
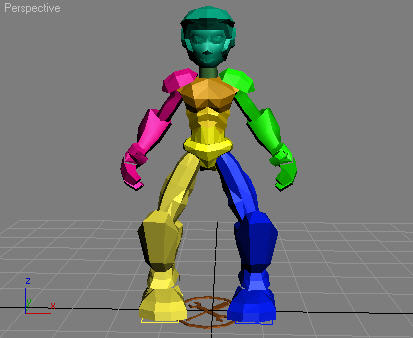
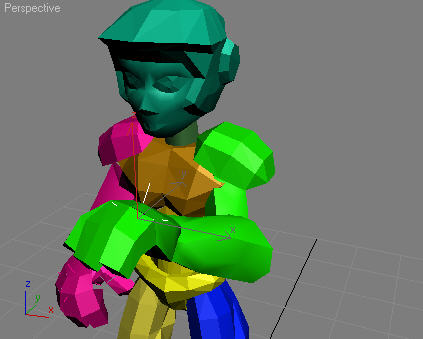
Quando a caixa torácica é movida de lado a lado com os braços em cinemática para frente, os braços simplesmente se movem com a caixa torácica.

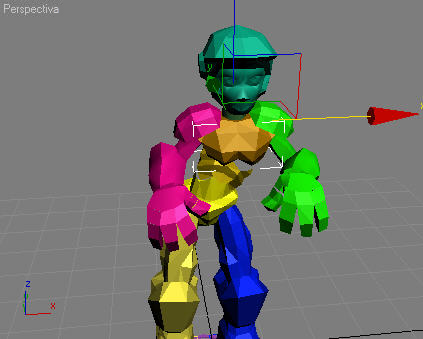
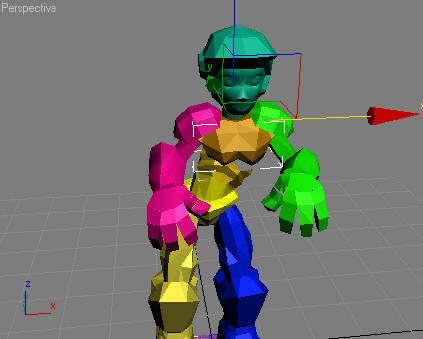
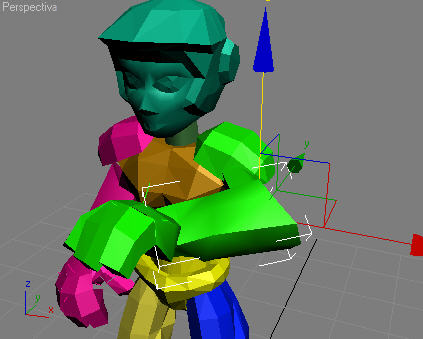
Com os braços em cinemática inversa, as mãos ficam paradas enquanto a caixa torácica é transformada.
Quando utilizar a cinemática inversa
Use a cinemática inversa quando um membro tiver uma posição final fixa. O exemplo mais comum disso é a animação de pernas caminhando, onde os pés devem estar plantados no chão sem deslizar para os lados à medida que você gira os ossos da perna. Outros exemplos seriam braços segurando outros objetos, como armas ou volantes.
Como esperar que o sistema de cinemática inversa do CAT se comporte
Mover o destino de cinemática inversa
Como você poderia esperar de qualquer sistema de cinemática inversa, quando você move o destino de cinemática inversa, a cadeia de cinemática inversa mantém sua configuração original o mais próximo possível.
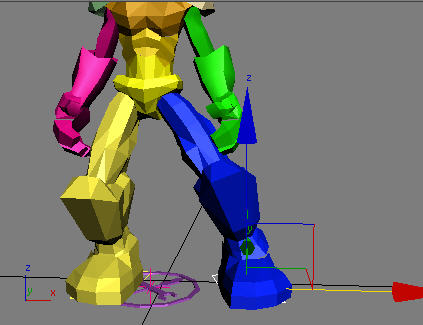
À medida que o destino de cinemática inversa da perna se move, o membro mantém a configuração de perna básica o máximo possível.
Girar o destino de cinemática inversa
Talvez você se surpreenda ao descobrir que girar o destino de cinemática inversa não gira o membro. Embora em primeira instância isso pareça estranho, na verdade torna o sistema de cinemática inversa do CAT mais flexível e não é um problema.
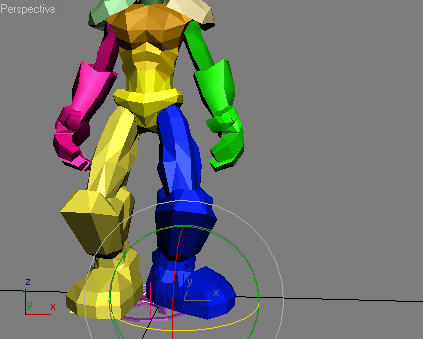
Quando você gira o destino de cinemática inversa, ele só gira o tornozelo. O resto do membro permanece intacto.
Uma maneira simples de lidar com isso é girar o osso da coxa separadamente (consulte Ajuste das rotações de osso de membro durante a animação, abaixo). Outra alternativa é restringir as rotações de coxa à plataforma para os pés.
Ajuste das rotações de osso de membro durante a animação
À medida que você anima o destino de cinemática inversa, talvez queira ajustar a orientação exata dos ossos na cadeia de cinemática inversa. Com CAT, você simplesmente gira os ossos no viewport conforme necessário.
A mão se moveu, mas o cotovelo é muito lento e, portanto, nós simplesmente puxamos o cotovelo para cima.
Alinhamento de destino
O valor Alinhamento de destino permite que você controle se a palma herdará ou não as rotações do destino de cinemática inversa.
Quando o valor de Alinhamento de destino for definido como 0,0, a palma se moverá com o destino de cinemática inversa, mas permanecerá alinhada ao último osso do membro (em humanos, o antebraço).