É possível definir se uma articulação comporta-se como uma junta, como vara deslizante de uma gaveta ou outro tipo de articulação ao configurar parâmetros de articulação para cada objeto na cadeia cinemática. As articulações controlam a rotação e a posição de um objeto relativamente ao seu pai.
Qualquer objeto tem no máximo duas implementações do tipo de articulação: uma implementação contém configurações para controlar a posição do objeto e a outra controla a rotação do objeto. Pode haver diferentes tipos de articulações posicionais e rotacionais. A disponibilidade dos parâmetros de articulação é determinada pelo tipo de solucionador de cinemática inversa atribuído a um objeto. Solucionadores de HI, por exemplo, são controlados com uma configuração angular preferida encontrada nos parâmetros de articulação rotacional. Solucionadores de HD têm parâmetros adicionais para mola de volta, precedência e amortecimento, não encontrados no solucionador de HI.
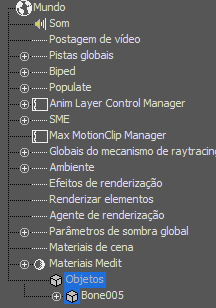
Qualquer hierarquia de objeto ou sistemas ósseos podem ter seus limites de articulações definidos. Selecione todos os objetos e ative a exibição dos ossos ou vínculos. Selecione o osso ou vínculo e abra o painel de Hierarquia  guia de Cinemática inversa. Role para baixo até as Articulações de deslizamento e rotacionais. Aqui, é possível ativar eixos e definir seus limites individuais.
guia de Cinemática inversa. Role para baixo até as Articulações de deslizamento e rotacionais. Aqui, é possível ativar eixos e definir seus limites individuais.
Tipos comuns de articulações
Os tipos de articulação mais comuns são as articulações rotacionais e deslizantes. Outros tipos de articulações comuns são caminho e superfície. Cada tipo de articulação exibe seu próprio conjunto de parâmetros de articulação.
- Juntas rotacionais
-
Controlam a rotação de objetos usando muitos dos controladores de rotação padrão. Os parâmetros das articulações rotacionais definem a capacidade do objeto de girar em torno de um eixo.
Para muitas estruturas de cinemática inversa, considere a possibilidade de utilizar um Controlador Euler XYZ. Controladores com base em quatérnion tendem a congelar se um objeto for movido para além dos limites das juntas rotacionais antes de ativar a cinemática inversa.
- Juntas deslizantes
-
Controlam a posição dos objetos usando muitos dos controladores de posição padrão. Os parâmetros para juntas deslizantes controlam se um objeto pode mover-se ao longo de um determinado eixo.
- Juntas de superfície
-
Controlam a posição dos objetos usando a restrição de Superfície. Os parâmetros controlam como o objeto é movido ao longo da sua superfície atribuída.
- Juntas de caminho
-
Controle o movimento posicional dos objetos usando uma restrição de Caminho. Os parâmetros para juntas de caminho controlam a distância que um objeto pode percorrer ao longo do seu caminho atribuído.
Usando parâmetros de articulação
A forma pela qual os secundários comportam-se com relação a cada um é determinada pela herança das transformações para baixo na cadeia. A configuração dos limites de articulação em objetos secundários individuais pode influenciar essa herança. Se três secundários em uma linha tiverem seus eixos rotacionais inativos, eles não poderão girar e, portanto, um pedaço da cadeia irá aparecer enrijecido. Ou se somente um eixo for ativado como uma junta deslizante, o componente poderá separar no espaço da cadeia.
Quando estiver usando um objeto com uma restrição de caminho em uma cadeia de cinemática inversa, é possível que o caminho apareça como se fosse parte da cadeia de cinemática inversa. É possível atingir esse efeito ao vincular o objeto usando a restrição de caminho e o caminho para o mesmo pai. O objeto do caminho não deve ter nenhum secundário e os outros objetos na cadeia de cinemática inversa devem ser vinculados ao objeto utilizando a restrição de caminho.
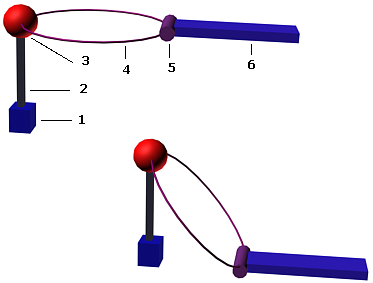
1. Base
2. Postagem
3. Cobertura
4. Anel
5. Marcador
6. Alça
Na imagem, a cantoneira usa uma restrição de caminho para atá-lo ao anel. A cadeia de cinemática inversa de um pai para filho é Postagem->Cobertura->Cantoneira->Alça. O anel é um filho da cobertura, mas não é parte da cadeia de cinemática inversa.
Copiando e colando parâmetros de articulação
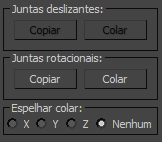
É possível copiar e colar na parte inferior da implementação dos parâmetros de objeto no painel de hierarquia para copiar e colar um conjunto completo de parâmetros da articulação de um objeto para o outro.
Existem funções separadas de copiar e colar para juntas deslizantes e juntas rotacionais. Cada tipo de junta salva os parâmetros copiados em áreas de transferência separadas.
Também é possível copiar as configurações de uma articulação a partir de um controlador que não seja de cinemática inversa para um controlador de cinemática inversa, mas não é possível copiar de um controlador de cinemática inversa para um controlador que não seja de cinemática inversa.