FEA 编辑器始终在不同部件之间的边界处保持单独的顶点(重复顶点),即,当网格匹配时,同一坐标存在两个或多个顶点(每个部件一个顶点)。在这些重合顶点上,接触的类型决定:
- 单独的顶点创建一个由部件共享的节点(粘合接触),
- 创建两个单独的节点,但不将它们连接在一起(自由接触),还是
- 创建两个单独的节点并使用自动生成的单元将它们连接在一起(表面接触)。
顶点合并操作在执行“检查模型”操作时或在求解阶段(“运行仿真”)开始时执行。根据分析类型、单元类型、接触类型和用于运行仿真的处理器(SimMech 或 Nastran),网格可能需要也可能不需要在接触部件之间匹配。
接触的网格要求
下表说明了装配件内的相邻部件是否需要使用零间隙拟合建模,或各种分析和接触类型是否允许部件之间存在初始间隙或干涉:
| 分析类别 | 表面之间是否允许初始间隙或干涉? | |
|---|---|---|
| 原生 Simulation Mechanical (SimMech) 求解器 | Nastran 求解器(请参见注释 A) | |
| 线性 | 否。必须为零间隙、零干涉(“自由”接触除外)。 | 是 |
| 非线性 |
是,适用于“表面”和“自由”接触。 否,适用于其他类型的接触。 |
是 |
| 热 | 否。必须为零间隙、零干涉(“自由”接触除外)。 | 是 |
| 静电 | 否。必须为零间隙、零干涉(“自由”接触除外)。 | (不适用) |
注释 A:Nastran“焊接”接触支持小初始间隙。Nastran“偏移焊接”和“表面(常规)”接触类型支持大初始间隙。对于所有 Nastran 分析和接触类型,允许小初始干涉。对于“焊接”和“偏移焊接”接触,将忽略干涉,因为节点已连接,并且其行为就像表面粘合在一起一样。对于“表面(常规)”接触,将重新定位从属(次要)接触表面上的节点,以便在计算结果前消除初始干涉。因此,将不会产生任何干涉配合反作用力。只是移除初始干涉。
使用原生 Simulation Mechanical (SimMech) 求解器时的网格匹配要求
下表说明了在使用 SimMech 求解器时是否需要为不同类型的分析和接触在相邻部件之间匹配网格。
| 接触类型 | ||||||
|---|---|---|---|---|---|---|
| 分析类型 | 粘合 | 焊接 | 自由/无接触 | 表面接触(请参见注释 4) | 边接触 | 热压配合接触 |
| 线性、静态应力 | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 匹配 | 匹配 | 匹配(请参见注释 5) |
| 线性、固有频率(模态)和载荷刚化固有频率(模态) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 仅限“滑动/无分离”(匹配) | 不适用 | 不适用 |
| 线性、临界屈曲载荷和瞬态应力(直接积分) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 仅限“滑动/无分离”(匹配) | 不适用 | 不适用 |
| 线性、其他 | 匹配或不匹配(请参见注释 2) | 匹配或不匹配(请参见注释 2) | 匹配或不匹配 | 仅限“滑动/无分离”(匹配) | 不适用 | 不适用 |
| 非线性 | 匹配或不匹配(请参见注释 3) | 匹配 | 匹配或不匹配 | 匹配或不匹配 | 不适用 | 不适用 |
| 热 | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 匹配 | 不适用 | 不适用 |
| 静电 | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 不适用 | 不适用 | 不适用 |
注释 1:如果您启用 智能粘合,则网格可以匹配也可以不匹配。如果您使用智能粘合,则必须匹配网格才能使部件粘合。
注释 2:以下分析类型使用来自模态分析的结果。因此,这些分析可以利用智能粘合(请参见注释 1),而无需任何其他接触设置:
- 响应谱
- 随机振动
- 频率响应
- 瞬态应力(模态叠加)
- DDAM。
注释 3:对于非线性分析,如果使用“固联”表面接触执行粘合,则网格可以不匹配。(基本接触类型是“表面”,表面接触的特定类型是“固联”。)如果不使用固联表面接触,则必须匹配网格且接触类型为“粘合”。固联表面接触使用接触对的关联菜单中的“编辑设置”命令进行设置。有关固联接触的详细信息,请参见 Simulation Mechanical 表面接触选项(非线性) 页面。
注释 4:对于线性分析,“表面接触”列提供了三种可用接触类型,即“表面”、“滑动/无分离”和“分离/无滑动”,而且所有这些类型均可从浏览器中选择。仅第一个类型(“表面”)适用于热分析。“热表面”接触可选择性地包括热阻,这会导致在热量流动时接触表面之间产生温差。非线性分析的表面接触类型和选项的设置方式有所不同。有关详细信息,请参考非线性 面面接触 页面及其各种子页面。
注释 5:“热压配合接触”列提供了两种可用接触类型,即“热压配合/滑动”和“热压配合/无滑动”。部件之间的干涉量可采用 CAD 几何体表示(通过重叠部件)。将模型导入 Simulation Mechanical 中后,表面会匹配(零干涉、零间隙),即,从几何体中删除干涉并在部件之间匹配网格。然而,数字格式的干涉量仍会保留。有关更多说明,请参见下面的热压配合/滑动和热压配合/无滑动部分。
- CAD 模型中的小间隙可在网格划分期间通过使用网格匹配容差删除。间隙必须删除掉才能匹配节点。(请参见 网格匹配 页面。
- 如果部件之间的间隙对于分析十分关键(即,不希望删除间隙),请使用手动创建的间隙单元(线性静态应力)或面面接触(机械运动仿真)。
- CAD 装配件的部件之间的干涉将在 CAD 数据导入过程中删除。但是,干涉会以数字形式记录下来,如上面注释 5 中所述。
使用 Autodesk Nastran 求解器时不需要网格匹配
使用 Nastran 求解器运行仿真时,任何分析类型或接触类型都不需要匹配网格(也称为共形网格或连续网格)。有关各种 Nastran 接触类型和关联参数的说明,请参见 Nastran 接触选项 页面。
选择默认接触类型
浏览器中的顶层“接触(默认值: __)”设置中指定的接触类型全局应用于模型。默认类型适用于任何未创建不同类型的显式接触对(将替代默认值)的接触表面。例如,如果可以假定装配件的所有部件彼此都完全连接起来(即,能够在其接触面处传递所有类型的载荷),则可保留“粘合”这一默认接触设置。
若要更改默认接触类型,请在“接触(默认值: __)”上单击鼠标右键,然后从关联菜单中选择所需的接触类型。
下面几部分介绍了每个可用的接触类型。
接触类型
可用接触类型的选择取决于分析类型。如果列出的任意接触类型选项未显示在关联菜单中,则表示当前分析类型不支持该接触类型。
默认值:
如果为显式接触条目选择了“默认”命令,则接触类型将沿用全局“接触(默认: __)”设置。对于现有接触对,只能在浏览器中选择“默认”,但创建显式接触对时无法选择此类型。
粘合:
粘合接触适用于所有单元类型。粘合后,两个表面在整个分析过程中都将完全接触,且载荷会从一个部件传递到相邻部件。在应力分析中,当一个表面上的节点发生变形时,相连表面上的节点也将以相同的量和方向发生变形。在热传递分析中,每个部件在连接处都具有相同的温度,以此类推。
为了在带有不匹配网格的模型中使用粘合接触,可以使用两种方法:
- 激活 智能粘合。
- 使用 Nastran 求解器而不是原生 SimMech 求解器运行仿真。Nastran 接触类型不需要匹配网格。
“粘合”接触类型默认对应于 Nastran“焊接(对称)”接触类型。但是,您可以通过“接触选项”对话框在以下 Nastran 接触类型中进行选择:
- 焊接(对称),默认映射:所有从属/次要节点都将连接到最近的主节点,而所有主节点都将连接到最近的从属/次要节点。
- 焊接(非对称):所有从属/次要节点都将连接到最近的主节点。
- 偏移焊接(对称):在两个表面之间存在显著距离时,用于对称焊接接触。
- 偏移焊接(非对称):在两个表面之间存在显著距离时,用于非对称焊接接触。
- Nastran 求解器:对于 Nastran 求解,术语焊接接触类似于 Simulation Mechanical 中的粘合接触。
- SimMech 求解器:对于使用原生 Simulation Mechanical 求解器运行的求解,意义截然不同。(请参见紧接在下面的“焊接”部分。)
焊接
焊接接触仅适用于块体和三维单元类型。如果选中“焊接”选项,则沿接触表面边缘的节点的行为与选中“粘合”选项时的行为相同。而沿这些表面内部的节点的行为与选中“自由/无接触”命令时的行为相同。如果在部件接口周界附近添加了焊接焊道,此接触类型将模拟两个部件之间的连接。载荷仅通过周界焊接从一个部件传递到另一个部件。内部表面节点将彼此自由分离甚至相互穿透。
“焊接”接触类型默认对应于 Nastran“焊接(对称)”接触类型。但是,您可以通过“接触选项”对话框在以下 Nastran 接触类型中进行选择:
- 焊接(对称),默认映射:所有从属/次要节点都将连接到最近的主节点,而所有主节点都将连接到最近的从属/次要节点。
- 焊接(非对称):所有从属/次要节点都将连接到最近的主节点。
- 偏移焊接(对称):在两个表面之间存在显著距离时,用于对称焊接接触。
- 偏移焊接(非对称):在两个表面之间存在显著距离时,用于非对称焊接接触。
自由/无接触
“自由/无接触”适用于所有单元类型。如果选中“自由/无接触”命令,则即使网格匹配,此接触对中的两个表面上的节点也不会收拢到一个节点。在 CAD 模型中,网格生成器不一定会强制网格匹配。这些节点将不会在部件之间传递载荷。在应力分析中,这些节点将相对于其他表面上的节点自由移动。在热传递分析中,将不会在部件之间传导热量,等等。
表面接触
表面接触仅适用于下面所示的单元类型。表面接触可用于 CAD 实体模型、二维创建的网格和手动构建的模型,如下所示。
- 线型静态应力:您可以指定块体部件之间、块体和板部件以及二维部件之间的表面接触。使用原生 Simulation Mechanical (SimMech) 求解器运行仿真时,仅在部件之间的间隙为零时创建接触。当您计划使用 Nastran 求解器运行仿真时,网格无需匹配。
如果选中“表面接触”命令且网格已匹配,则会在节点之间放置长度为零的接触单元(类似于用户创建的间隙单元)。这些节点可以自由相对移动,但节点在接触时不能彼此穿过。想象一下在这些表面上的节点之间创建了一条非常短的线。如果该线在分析过程中变长,则它对模型没有任何影响。如果该线变为零长度,它将用作具有将阻碍此运动的刚度值的弹簧。
当使用“表面接触”时,分析将涉及一个迭代过程;因此,运行分析花费的时间比使用粘合接触时要长。此过程可用于确定因载荷而产生的变形是否会导致这些表面上的每对节点处于接触状态。
注: 有关与线性应力分析中的接触单元相关的其他建模信息,请参见 使用间隙单元执行分析。当为表面接触对定义接触单元时,将为每个接触单元计算方向。对于使用原生 Simulation Mechanical 求解器运行的求解,您可以控制用于计算此方向的方法。此外,可以为使用的接触类型包含摩擦。有关详细信息,请参见 Simulation Mechanical 接触选项 页面的“摩擦选项卡”部分。对于 Nastran 求解,请参见 Nastran 接触选项 页面的“常规选项卡”部分,以了解有关摩擦和其他接触参数的信息。
线性材料模型静态应力分析中的接触假设通过接触中原始存在的同一组节点传递接触力,且力的方向与原始法向方向相同。即,变形不会更改接触中的点或方向(小变形理论)。
- 机械运动仿真和非线性应力:可以指定块体、壳、二维、梁和桁架部件的组合之间的接触。非线性分析中表面接触的定义与线性分析中表面接触的定义不同。由于非线性分析可以计算大变形,因此部件无需实际接触即可创建自动接触。
在“接触选项”对话框中输入机械运动仿真或非线性静态应力分析中的接触参数。此对话框及其包含的各种选项与线性分析、热分析和静电分析的接触设置截然不同。此外,静摩擦和滑动(动态)摩擦可包含在非线性分析中。(有关详细信息,请参见 面面接触 页面及其各种子页面。)
- 热传递分析:可以指定块体部件之间、块体和板部件之间、板部件之间以及二维部件之间的表面接触。对于使用原生 Simulation Mechanical (SimMech) 求解器运行的求解,仅在部件之间的初始间隙为零时生成自动接触。当您计划使用 Nastran 求解器运行仿真时,网格无需匹配。
热分析中的表面接触会在表面之间创建零厚度二维或三维单元。由于两个部件的节点未合并到一起,因此每当接触区域上有热通量时,都可能会跨连接存在温度梯度。
对于热分析,可以为任何表面接触对定义接触热阻。使用此热阻可以模拟接触区域上的不良热传导,使得将在接触表面之间产生温差。还可以使用此热阻模拟两个部件之间的薄膜,例如电绝缘体。有关详细信息,请参见 Simulation Mechanical 接触选项 页面的“热选项卡”部分。对于 Nastran 求解,请参见 Nastran 接触选项 页面的“高级选项卡”部分,以了解有关接触热导率和其他接触参数的信息。
热接触示例
接触单元不是在两个具有表面接触的部件粘合到另一个部件(或多个部件)的边界处创建的。例如,假设部件 2 和 4 被定义为彼此表面接触并被粘合到部件 1。请参见图 10(a)。连接细节表明部件 2 和 4 彼此分离,间隙由 8 节点热接触单元(对于三维模型)或 4 节点热接触单元(对于二维模型)填充。请参见图 10(b)。然而,在部件 2 和 4 粘合到部件 1 的位置处未创建接触单元。
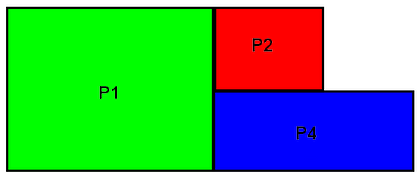
(a) 三个部件模型示例。部件 2 (P2) 和 4 (P4) 具有它们之间定义的表面接触。两者都粘合到部件 1 (P1)。
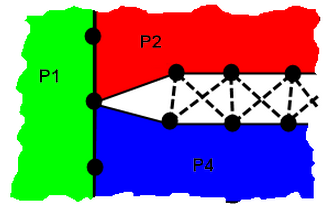
接触单元

(b) 部件之间接触的详细视图。在每一处都创建了热接触单元,由于粘合,与部件 1 的接触中的单元除外。因此,部件 2 和 4 之间的接触面积小于理想值。(为清晰起见,部件 2 和 4 之间的间隙被放大。在分析中不会创建间隙。)
图 10:热接触示例 提示: 热阻为 0(表示部件之间完全接触)不是很好的选择。热阻为 0 表示传导率为无限大,这会导致数值求解过程中发生不精确性。当存在不精确性时,使用一个较小的非零值模拟此类情况。
“表面”接触默认对应于 Nastran“常规(对称)”接触类型。或者,可以在“接触选项”对话框内选择“常规(非对称)”类型。
滑动/无分离
粘合接触曲表面处于法向方向,同时允许表面相对于彼此朝切向方向滑动。
“滑动/无分离”接触默认对应于 Nastran“滑动(对称)”接触类型。此外,可以在“接触选项”对话框内选择“滑动(非对称)”类型。
分离/无滑动
接触表面在法向方向可以部分或完全分离,但不能相对于彼此朝切向方向滑动。
“分离/无滑动”接触默认对应于 Nastran“粗糙(对称)”接触类型。或者,可以在“接触选项”对话框内选择“粗糙(非对称)”类型。
边接触(仅 SimMech 求解器)
如果选中“边接触”命令,则沿接触面边缘的节点的行为与选中“表面接触”命令时的行为相同。沿这些表面内部的节点的行为与选中“自由/无接触”命令时的行为相同。也就是说,接触仅发生在沿表面边缘的接触区域周界的周围。
使用 Nastran 求解器运行的仿真不支持“边接触”。
热压配合/滑动(仅 SimMech 求解器)
表现像“表面接触”,但接触部件之间存在初始干涉。干涉量(配合强度)可从 CAD 几何体中自动确定,也可以手动指定它。(可选)可以包含接触表面之间的摩擦。有关适用的接触设置的详细信息,请参见 Simulation Mechanical 接触选项 页面的“热压配合选项卡”部分。
使用 Nastran 求解器运行的仿真不支持“热压配合/滑动”接触。
热压配合/无滑动(仅 SimMech 求解器)
表现像“分离/无滑动”接触,但接触部件之间存在初始干涉。配合强度和摩擦力足以防止接触部件之间产生相对运动(滑动)时,使用此选项。径向干涉可以自动指定(基于 CAD),也可以手动指定,方法与选择“热压配合/滑动”接触时相同。有关详细信息,请参见 Simulation Mechanical 接触选项 页面的“热压配合选项卡”部分。
使用 Nastran 求解器运行的仿真不支持“热压配合/无滑动”接触。
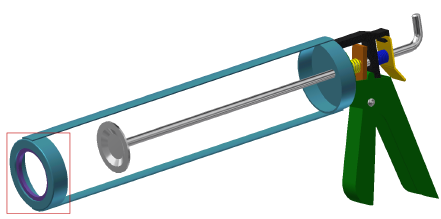
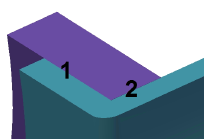
示例
- 接触面 1 的接触类型为“表面接触”。此接触不会约束环朝法向或切向方向移动。
- 接触面 2 的接触类型为“热压配合/无滑动”。此接触具有初始干涉配合,因为环的外径大于枪架的内径。然而,如果热压配合的摩擦力被克服,环仍可朝法向和切向方向自由移动。