Beim Erstellen eines Bewegungspfads analysiert Revit die aktuelle Ansicht und berechnet den optimalen (kürzesten) Pfad. Während der Berechnung werden mit dem Bewegungspfad die als Hindernisse ermittelten Kategorien (in den Einstellungen definiert) vermieden, und Breite und Körperbewegung einer typischen Person beim Gehen werden berücksichtigt.
Die Bewegungspfad-Analyse basiert auf der Simulex-Analyse-Engine. Sie erfolgt in vier Schritten:
- Definieren Sie ein Raster, und generieren Sie eine vorläufige Route.
- Ermitteln Sie die nächstgelegenen Hindernisse entlang der vorläufigen Route.
- Verwenden Sie Eck-Fangpunkte, um einen geänderten Pfad zu generieren.
- Erstellen Sie einen Versatz von den Hindernissen, um einen optimalen Laufweg zu generieren.

Diese Schritte sind interne Prozesse bei der Analyse. In den folgenden Abschnitten werden die Schritte beschrieben, um zu erklären, wie die Pfadlinie generiert wird.
Erstellen einer Route
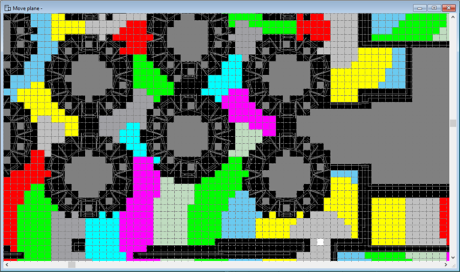
Um eine Bewegungspfad-Analyse zu starten, wird in Revit ein Raster auf die Draufsicht angewendet. Die Auflösung des Rasters ist auf 0,2 m festgelegt. Jede Rasterzelle erhält einen Wert in Bezug auf den Abstand vom Endpunkt des Pfads. Farben im Bild zeigen die Abstandsbereiche an.
Zellen mit als Hindernisse definierten Kategorien werden nicht berücksichtigt (im Bild schwarz dargestellt). Wenn eine Zelle an zwei Seiten von diesen entfernten Zellen umgeben ist, wird diese Zelle ebenfalls nicht berücksichtigt. In der folgenden Abbildung wird diese Situation zwischen einigen Tischen dargestellt. Diese Situation kann eine Analyse beeinflussen, wenn die Abstände sehr eng sind.
| Raster und Abstände |
|
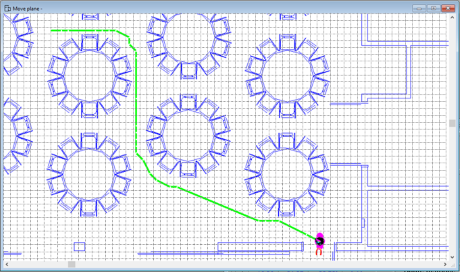
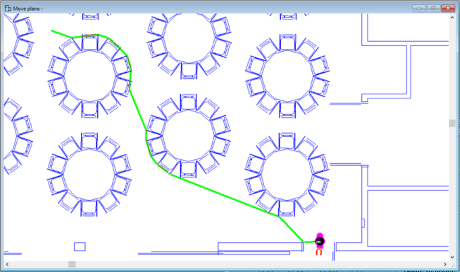
Auf Basis dieser anfänglichen Berechnungen wird in Revit ein vorläufiger Pfad generiert, und es werden Knoten durch die Mittelpunkte der Zellen entlang des kürzestmöglichen Pfads erstellt. Der kürzeste hindernisfreie Pfad wird mithilfe einer benutzerdefinierten Form des A*-Algorithmus ermittelt.
| Vorläufiger Pfad |
|
Ermitteln von Hindernissen in der Nähe der vorläufigen Route
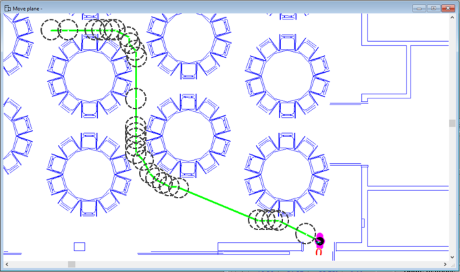
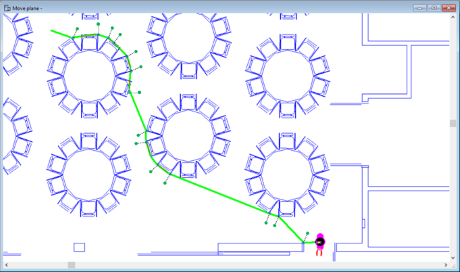
Um einen besser geeigneten Pfad zu generieren, werden in Revit Hindernisse in der Nähe des vorläufigen Pfads ermittelt. Um in der Nähe befindliche Hindernisse zu ermitteln, wird ein 0,03-Radiuskreis an jedem Knoten entlang des vorläufigen Pfads platziert. Der nächstgelegene Schnittpunkt eines Hindernisses mit dem Kreis wird als Eck-Fangpunkt für den geänderten Pfad definiert.
| Ermitteln nahegelegener Hindernisse |
|
Zur Erfassung zusätzlicher Eck-Fangpunkte wird in Revit ein weiterer Durchgang entlang des vorläufigen Pfads durchgeführt. An jedem Knoten, an dem der 0,3-m-Radiuskreis keine Hindernisse schneidet, wird ein größerer Radiuskreis von 0,566 m verwendet, um mögliche weiter entfernte Hindernisse zu ermitteln.
| Ermitteln nahegelegener Hindernisse – zweiter Durchgang |
|
Generieren eines geänderten Pfads
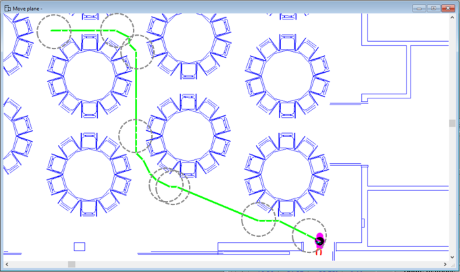
Mithilfe dieser Eck-Fangpunkte wird in Revit ein geänderter Pfad generiert, der einer Route entlang des vorläufigen Pfads so nahe an den Hindernissen wie möglich folgt. Dieser geänderte Pfad wird als Basis zum Generieren des endgültigen Bewegungspfads verwendet.
| Geänderter Pfad |
|
Versetzen des optimalen Bewegungspfads
In Revit werden alle Knoten auf dem geänderten Pfad 0,3 m vom Hindernis weg versetzt (0,25 m für Körperradius und 0,05 m für Körperbewegung). Beim Versatz erfolgt eine Projektion von 90° vom Einfahrts-/Ausfahrtswinkel zum Knoten, wobei mindestens 30° zwischen den Versatzpunkten liegen.
| Versatz für Körperbreite |
|
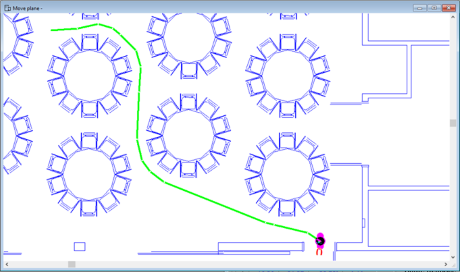
Versatzpunkte, die sehr nahe beieinander liegen (weniger als 0,2 m), werden zusammengeführt, um den endgültigen Pfad zu glätten. In Revit wird der endgültige, optimierte Pfad mithilfe der Versatzpunkte gezeichnet.
| Erstellen des endgültigen Bewegungspfads |
|