Sie legen fest, ob sich ein Gelenk wie ein Scharnier, ein Schubladeneinschub oder ein anderer Gelenktyp verhält, indem Sie die Gelenkparameter jedes Objekts in der kinematischen Kette entsprechend einstellen. Das Gelenk bestimmt, wie ein untergeordnetes Objekt in Bezug auf das übergeordnete Objekt gedreht und positioniert wird.
Ein Objekt hat maximal zwei Gelenktyp-Rollouts: Ein Rollout enthält Einstellungen zur Steuerung der Objektposition, das andere Rollout enthält Einstellungen zur Steuerung der Objektrotation. Es gibt viele verschiedene Typen von Positions- und Drehgelenken. Welche Gelenkparameter zur Verfügung stehen, wird von dem IK-Berechnungstyp bestimmt, der einem Objekt zugewiesen ist. VU Berechnungen werden zum Beispiel mit einer Einstellung für den bevorzugten Winkel in den Parametern für Drehgelenke gesteuert. VA Berechnungen verfügen über zusätzliche Parameter für Zurückspringen, Priorität und Dämpfen, die es bei der VU-Berechnung nicht gibt.
Sie können für eine beliebige Hierarchie von Objekten oder Bones-Systemen Gelenkbeschränkungen definieren. Wählen Sie alle Objekte aus, und aktivieren Sie deren Bone- oder Verknüpfungsanzeige. Wählen Sie den Bone oder die Verknüpfung aus, und öffnen Sie in der Hierarchiegruppe  Registerkarte "IK". Blättern Sie nach unten zu den Einstellungen für Gleit- und Drehgelenke. Hier können Sie Achsen aktivieren und Beschränkungen für die einzelnen Achsen festlegen.
Registerkarte "IK". Blättern Sie nach unten zu den Einstellungen für Gleit- und Drehgelenke. Hier können Sie Achsen aktivieren und Beschränkungen für die einzelnen Achsen festlegen.
Allgemeine Gelenktypen
Die gebräuchlichsten Gelenktypen sind Dreh- und Gleitgelenke. Andere übliche Gelenktypen sind Pfadgelenke und Oberflächengelenke. Jeder Gelenktyp hat seinen eigenen Satz an Parametern für das jeweilige Gelenk.
- Drehgelenke
-
Steuern die Drehung von Objekten unter Verwendung vieler Standard-Rotations-Controller. Die Parameter für Drehgelenke stellen die Drehfähigkeit eines Objekts um eine gegebene Achse ein.
Für viele IK-Strukturen ist ein Euler-XYZ-Controller geeignet. Quaternion-Controller können "einfrieren", wenn ein Objekt vor dem Aktivieren der inversen Kinematik über die Beschränkung des Drehgelenks hinaus bewegt wird.
- Gleitgelenke
-
Steuern die Position von Objekten unter Verwendung der Standard-Positions-Controller. Über die Parameter der Gleitgelenke wird bestimmt, ob ein Objekt entlang einer bestimmten Achse bewegt werden kann.
- Oberflächengelenke
-
Steuern die Position von Objekten durch eine Oberflächenbeschränkung. Über die Parameter wird bestimmt, wie das Objekt entlang der ihm zugewiesenen Oberfläche bewegt wird.
- Pfadgelenke
-
Steuern die Positionsbewegung von Objekten durch eine Pfadbeschränkung. Über die Parameter der Pfadgelenke wird bestimmt, wie weit ein Objekt entlang des ihm zugewiesenen Pfads bewegt werden kann.
Verwenden von Gelenkparametern
Wie sich untergeordnete Objekte zueinander verhalten, wird von der Vererbung der Transformationen in der Kette bestimmt. Das Festlegen von Gelenkbeschränkungen für einzelne untergeordnete Objekte kann diese Vererbung beeinflussen. Wenn alle Drehachsen von drei aufeinander folgenden untergeordneten Objekten deaktiviert sind, können sie nicht gedreht werden, und ein Teil der Kette erscheint steif. Wenn nur eine Achse als Gleitgelenk aktiv ist, kann sich die Komponente räumlich von der Kette trennen.
Wenn Sie ein Objekt, dem ein Pfad-Controller zugewiesen wurde, in einer IK-Kette verwenden, sollten Sie den Pfad so einstellen, dass es aussieht, als sei er Teil der IK-Kette. Hierzu müssen Sie das Objekt, dem der Pfad-Controller zugewiesen wurde, und den Pfad mit dem gleichen übergeordneten Objekt verknüpfen. Das Pfadobjekt sollte keine untergeordneten Objekte haben, und andere Objekte in der IK-Kette sollten mit dem Objekt, dem der Pfad-Controller zugewiesen wurde, verknüpft werden.
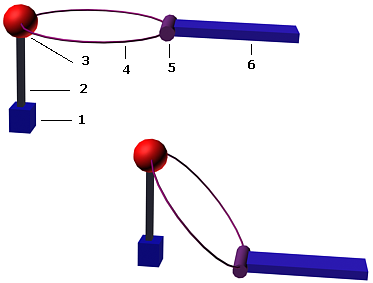
1. Basis
2. Pfosten
3. Verschluss
4. Ring
5. Knauf
6. Griff
In der Abbildung wird zum Befestigen des Knaufs am Ring ein Pfad-Controller verwendet. Die IK-Kette vom übergeordneten zum untergeordneten Objekt lautet: Pfosten->Abschlusskugel->Knauf->Griff. Der Ring ist das untergeordnete Objekt der Abschlusskugel, aber nicht Teil der IK-Kette.
Kopieren und Einfügen von Gelenkparametern
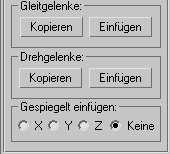
Mithilfe der Schaltflächen zum Kopieren und Einfügen im unteren Teil des Rollouts "Objektparameter" in der Hierarchiegruppe können Sie einen ganzen Satz Gelenkparameter von einem Objekt in ein anderes Objekt kopieren.
Für Gleitgelenke und Drehgelenke gibt es separate Funktionen zum Kopieren und Einfügen. Jeder Gelenktyp speichert kopierte Parameter in separaten Zwischenablagen.
Sie können Gelenkeinstellungen auch von einem Nicht-IK-Controller in einen IK-Controller kopieren, aber nicht umgekehrt.