Im Rollout "Bewegungsparameter" legen Sie die Merkmale eines Vertreterobjekts wie Geschwindigkeit, Beschleunigung und andere Faktoren fest. Hier können Sie außerdem den Vertreter mit einem Biped verknüpfen.
-
 Erstellungsgruppe >
Erstellungsgruppe >  (Helfer) > Rollout "Objekttyp" > Vertreter > Rollout "Bewegungsparameter"
(Helfer) > Rollout "Objekttyp" > Vertreter > Rollout "Bewegungsparameter"
-
Wählen Sie ein Vertreter-Objekt aus. >
 Modifikatorgruppe > Rollout "Bewegungsparameter"
Modifikatorgruppe > Rollout "Bewegungsparameter"
Benutzeroberfläche
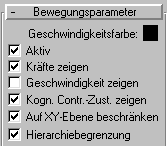
- Geschwindigkeitsfarbe
- Wenn "Geschwindigkeit zeigen" aktiviert ist, wird während der Simulationslösung in der Mitte des Vertreters ein Vektor in der hier angegebenen Farbe gezeichnet. Die Länge des Vektors gibt die relative Geschwindigkeit des Vertreters an. Vorgabe = Schwarz.
- Aktiv
- Das Vertreterobjekt wird von einem Crowd-Objekt gesteuert. Vorgabe = Aktiviert.
- Kräfte zeigen
- Die Kräfte, die durch anwendbare Verhaltensweisen auf einen Vertreter wirken, werden als Vektoren gezeichnet, deren Länge die Stärke der Kraft darstellt und deren Ausrichtung die Richtung angibt, in der das Verhalten den Vertreter lenkt. Vorgabe = Aktiviert.
Wenn ein Vertreter beispielsweise von einem Space Warp-Verhalten und einem Umhergehen-Verhalten beeinflusst wird, werden die zugehörigen Vektoren (falls die Vorgabefarben verwendet werden) in gelb und blaugrün angezeigt. Diese Vektoren sind nur während der Lösung der Crowd-Simulation sichtbar.
- Geschwindigkeit zeigen
- Wenn diese Option aktiviert ist, wird ein Vektor in der Geschwindigkeitsfarbe (siehe oben) gezeichnet, dessen Länge die relative Geschwindigkeit des Vertreters anzeigt. Dieser Vektor ist nur während der Lösung der Crowd-Simulation sichtbar. Vorgabe = Deaktiviert.
- Kognitiven Controller-Zustand zeigen
- Während einer Lösung erscheint eine Textbeschriftung neben dem Vertreter, die, falls vorhanden, den Namen des Zustands oder des Übergangs im kognitiven Controller angibt, der das Verhalten derzeit steuert. Vorgabe = Aktiviert.
- Auf XY-Ebene beschränken
- Der Vertreter bleibt während der gesamten Simulation auf seiner anfänglichen Höhe (der Position auf der Welt-Z-Achse). Wenn diese Option deaktiviert ist, kann sich die Höhe des Vertreters während der Simulation ändern, beispielsweise wenn er ein Objekt auf einer anderen Höhe sucht. Vorgabe = Aktiviert.
- Hierarchiebegrenzung
- Wenn diese Option aktiviert ist, verwendet das Ausweichverhalten den Begrenzungsrahmen des Vertreters und aller seiner untergeordneten Objekte zur Durchführung des Verhaltens. Vorgabe = Aktiviert.
Bereich "Geschwindigkeit"
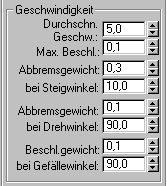
- Durchschnittliche Geschwindigkeit
- Gibt die Grundgeschwindigkeit des Vertreters in 3ds Max-Einheiten (oder dem aktuellen Einheitentyp) pro Frame an. Vorgabe = 5,0.
Die Geschwindigkeit des Vertreters kann während der Simulation durch eine Reihe von Faktoren geändert werden, z. B. durch die inhärente Geschwindigkeit eines verknüpften Bipeds oder durch eine Abweichungseinstellung eines Verhaltens.
- Maximale Beschleunigung
- Dieser Wert multipliziert mit der Durchschnittsgeschwindigkeit ergibt die tatsächliche maximale Beschleunigung. Vorgabe = 0,1.
Beispiel: Mit den Vorgabewerten 5,0 für die Durchschnittsgeschwindigkeit und 0,1 für die maximale Beschleunigung kann die Beschleunigung oder Verzögerung zu einem bestimmten Zeitpunkt nicht größer als 0,5 Einheiten/Frame/Frame sein.
- Abbremsgewichtung
- Gibt an, wie stark ein Vertreter abbremst, wenn er sich dreht.
Je höher die Einstellung, desto stärker bremst der Vertreter ab, wenn er den Drehungswinkel erreicht (siehe folgenden Parameter). Mit dem Wert 0 bremst der Vertreter nicht ab, mit dem Wert 1 stoppt er ganz. Vorgabe = 0,3.
Der Algorithmus berechnet einen Wert d, der linear von 0 bis (1 - Abbremsgewicht) verläuft, während der Drehungswinkel des Vertreters von 0 zum vom Benutzer angegebenen Drehwinkel ansteigt. Die Geschwindigkeit des Vertreters wird dann mit d multipliziert. Wenn der Vertreter beispielsweise mit dem Drehwinkel oder einem größeren Winkel dreht, wird die Geschwindigkeit mit (1 - Abbremsgewicht) multipliziert, wodurch sich die maximal mit diesem Parameter mögliche Abbremsung ergibt. Wenn der Vertreter sich überhaupt nicht dreht, wird die Geschwindigkeit vom Abbremsgewicht nicht beeinflusst. Wenn sich der Vertreter um die Hälfte des angegebenen Drehwinkels dreht, ist d = Abbremsgewicht / 2; seine Geschwindigkeit wird also mit (1 - Abbremsgewicht / 2) multipliziert.
Nehmen Sie als Beispiel ein Vertreterobjekt, das sich mit 10 Einheiten pro Frame fortbewegt. Der Wert für "Abbremsgewicht" ist auf 0,4 und der Wert für "Bei Drehwinkel" auf 30 eingestellt. Wenn sich der Vertreter um 15 Grad gedreht hat (die Hälfte des Werts für "Bei Drehwinkel"), beträgt das effektive Abbremsgewicht 0,2. Wenn Sie diesen Wert von 1 subtrahieren, erhalten Sie 0,8. Multipliziert mit der Geschwindigkeit des Vertreters ergibt dies 8 Einheiten pro Sekunde, wenn die Drehung zur Hälfte ausgeführt wurde. Nach einer vollen Drehung (30 Grad) bewegt sich der Vertreter mit 6 Einheiten pro Frame fort.
- Bei Drehwinkel
- Gibt den Drehwinkel an, bei dem der Verzögerungseffekt des Abbremsgewichts seine volle Wirkung erreicht. Vorgabe = 10,0.
Wenn der aktuelle Drehwinkel geringer als der Wert für "Bei Drehwinkel" ist, dividiert der Algorithmus den aktuellen Drehwinkel und anschließend die Einstellung "Abbremsgewicht" durch das Ergebnis, um das effektive Abbremsgewicht abzuleiten.
- Abbremsgewichtung
- Gibt an, wie stark ein Vertreter abbremst, wenn er sich auf einer Schräge nach oben bewegt. Vorgabe = 0,1.
Eine vollständige Erklärung finden Sie unter Abbremsgewicht.
- Bei Steigwinkel
- Gibt den aufwärts gerichteten Winkel an, bei dem der Verzögerungseffekt des Abbremsgewichts seine volle Wirkung erreicht. Vorgabe = 90,0.
- Beschleunigungsgewichtung
- Gibt an, wie stark ein Vertreter beschleunigt, wenn er sich abwärts bewegt. Vorgabe = 0,1.
Eine vollständige Erklärung finden Sie unter Abbremsgewicht, mit dem Unterschied, dass das Beschleunigungsgewicht die Geschwindigkeit erhöht und nicht verringert. Deshalb wird das effektive Beschleunigungsgewicht zu 1 addiert und nicht davon subtrahiert.
- Bei Gefällewinkel
- Gibt den abwärts gerichteten Winkel an, bei dem der Beschleunigungseffekt des Beschleunigungsgewichts seine volle Wirkung erreicht. Vorgabe = 90,0.
Bereich Drehen
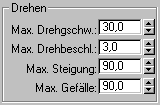
Diese Parameter beeinflussen das Drehverhalten eines Vertreters, d. h. wie er als Reaktion auf Kräfte, die vom Crowd-Verhalten auf ihn einwirken, seine Richtung ändert.
Mit dem Ausrichtungsverhalten können Sie beeinflussen, wie ein Vertreter sich unabhängig von der eigentlichen Bewegungsrichtung dreht und neigt.
Die Drehung wird sowohl auf Objekte angewendet, die sich auf dem Boden bewegen, als auch auf Objekte, die durch die Luft fliegen.
- Maximale Drehgeschwindigkeit
- Gibt an, wie weit (in Grad) sich ein Vertreter pro Frame höchstens drehen kann. Gilt sowohl für Drehung als auch für Neigung. Vorgabe = 30,0.
- Maximale Drehbeschleunigung
- Gibt an, wie stark sich der Drehungs- oder Neigungswinkel des Vertreters pro Frame ändern kann. Diese Einstellung steuert die Winkelbeschleunigung bzw. -verzögerung. Um ruckhafte Drehungen zu vermeiden, sollten Sie den Wert relativ niedrig einstellen. Vorgabe = 3,0. Tipp: Wenn sich ein Vertreter während einer Simulation zu zögerlich dreht, erhöhen Sie die maximale Drehgeschwindigkeit oder die maximale Drehbeschleunigung oder beide.
- Maximale Steigung
- Gibt an, um wie viel Grad ein Vertreter pro Frame höchstens steigen kann. Beispielsweise können die meisten Vögel nicht vertikal nach oben fliegen, deshalb können Sie hier für einen Vogel 45 einstellen. Vorgabe = 90,0.
- Maximales Gefälle
- Gibt an, um wie viel Grad ein Vertreter pro Frame höchstens sinken kann. Vorgabe = 90,0.
Beispielsweise können Sie für einen Vogel, der nicht senkrecht nach oben, aber im Sturzflug senkrecht nach unten fliegen kann, den maximalen Steigungswinkel auf 45 und den maximalen Gefällewinkel auf 90 einstellen.
Bereich "Kurvenneigung"
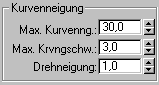
Diese Parameter beeinflussen, wie stark sich der Vertreter in Kurven neigt, d. h. wie stark er sich um seine von vorn nach hinten verlaufende Achse neigt, während sie bei der Fortbewegung die Richtung ändert. Die Kurvenneigung wird normalerweise für Objekte verwendet, die sich in der Luft oder auf dem Wasser bewegen, kann jedoch auch auf Objekte auf dem Boden angewendet werden, z. B. auf ein- oder zweirädrige Fahrzeuge.
- Maximale Kurvenneigung
- Gibt an, wie stark (in Grad) sich ein Vertreter in einer Kurve neigen kann. Vorgabe = 30,0.
- Maximale Kurvengeschwindigkeit
- Gibt an, wie stark (in Grad) sich ein Vertreter pro Frame höchstens neigen kann. Vorgabe = 3,0.
- Drehneigung
- Gibt an, wie stark (in Grad) sich ein Vertreter abhängig vom Drehwinkel am aktuellen Frame neigt. Wenn beispielsweise Drehneigung auf 1 eingestellt ist, neigt sich der Vertreter pro Drehungsgrad am gegebenen Frame ebenfalls um 1 Grad. Vorgabe = 1,0.
Bereich "Biped"
Diese Parameter beziehen sich auf die Verwendung von Bipeds, die mit Vertretern verknüpft sind. Wenn der Biped eine Figuranimation durchführen soll, während er dem Kurs des Vertreters folgt, müssen Sie Bewegungsfluss-Methoden einsetzen. Ein Verfahren finden Sie unter So verwenden Sie Bipeds in einer Crowd-Simulation.
- Biped verwenden
- Verknüpft den Vertreter mit einem Biped (der über die Schaltfläche unter diesem Kontrollkästchen angegeben wird) und bewirkt, dass die Geschwindigkeit des Vertreters durch die vorhandene Bewegung des Bipeds festgelegt wird. Das Verhalten (z. B. ein anderes Objekt zu suchen) wird weiterhin durch ein Crowd-Objekt definiert. Anmerkung: Dieses Kontrollkästchen ist nicht verfügbar, wenn Sie einen Biped mit der Schaltfläche bezeichnen.
- [Schaltfläche "Biped"]
-
Klicken, um einen Biped auszuwählen, der mit der Bewegung des Vertreters verbunden ist. Bevor Sie einen Biped auswählen, zeigt die Beschriftung auf dieser Schaltfläche "Keine". Wenn Sie einen Biped auswählen, wird der Biped-Name angezeigt.
Um einen Biped auszuwählen, klicken Sie auf dessen Massenmittelpunkt-Objekt (z. B. Bip001) in einem Ansichtsfenster. Sie können auch das Dialogfeld "Objekt auswählen" verwenden, das Sie durch Drücken der Taste H oder durch Klicken auf die Schaltfläche
 (Nach Namen auswählen) öffnen können. Die Auswahl-Übersicht kann dafür nicht verwendet werden. Tipp: Bei der Arbeit im Ansichtsfenster ändert sich der Mauszeiger in ein Fadenkreuz, wenn Sie ihn über dem Massenmittelpunkt eines Bipeds platzieren.
(Nach Namen auswählen) öffnen können. Die Auswahl-Übersicht kann dafür nicht verwendet werden. Tipp: Bei der Arbeit im Ansichtsfenster ändert sich der Mauszeiger in ein Fadenkreuz, wenn Sie ihn über dem Massenmittelpunkt eines Bipeds platzieren. - Start-Frame
- Gibt an, bei welchem Frame die Wiedergabe des ersten Clips des Bipeds beginnt.
Wenn mehrere Bipeds denselben Anfangsclip gemeinsam verwenden und Sie diese Einstellung von Biped zu Biped variieren, können Sie vermeiden, dass Ihre Bipeds im Gleichschritt marschieren. Das ist praktisch, wenn Sie die Funktionen des Dialogfelds "Mehrere Vertreter bearbeiten" nutzen, um für jeden Vertreter nach dem Zufallsprinzip einen anderen Start-Frame festzulegen.
- Priorität
- Legt die Priorität des Vertreters fest, mit der die Reihenfolge bestimmt wird, in der Biped-/Vertreter-Simulationen gelöst werden.
Detaillierte Informationen finden Sie unter Rollout "Priorität".
- Methode zur Auswahl des ersten Clips
- Legt fest, welcher Motion-Clip im gemeinsamen Bewegungsflussdiagramm anfänglich zur Animation des mit dem Vertreter verknüpften Bipeds verwendet wird.
- Erster Clip des aktuellen Skripts Verwendet den ersten Clip im Bewegungsflussskript des Bipeds, falls ein Skript vorhanden ist. Wenn diese Option aktiviert ist, aber kein Skript vorhanden ist, erscheint eine Fehlermeldung.
- Zufälliger Ausgangsclip Verwendet die zufälligen Anfangsclips, die im gemeinsam verwendeten Bewegungsflussdiagramm angegeben sind, falls zufällige Anfangsclips festgelegt wurden. Wenn diese Option aktiviert ist, aber keine zufälligen Ausgangsclips festgelegt wurden, erscheint eine Fehlermeldung.