![]()
Pour que les mouvements du bipède semblent naturels, la rotation de certaines de ses articulations est limitée (notamment pour les coudes et les genoux). Lorsqu'une articulation peut tourner sur les trois axes X, Y et Z, on dit qu'elle a trois degrés de liberté. Pour modifier le degré de liberté d'une articulation, sélectionnez-la et réglez les options du panneau déroulant Verrous, dans le groupe de fonctions Hiérarchie.
Le tableau ci-dessous présente le degré de liberté de chaque segment. Bipède permet un degré de liberté légèrement supérieur à celui des humains. Toutes les rotations sont effectuées dans le système de coordonnées local.
Pour faire pivoter le bassin du bipède dans les trois dimensions, reportez-vous à la section Bassin comme joint à rotule.
Contraintes de mouvement des bipèdes
Certaines parties du bipède possèdent des conditions spéciales qui régissent la manière dont vous pouvez les transformer, comme indiqué dans le tableau ci-après et dans les sections suivantes.
| Segment de bipède | Nom de segment | Axes libres | Commentaires |
|---|---|---|---|
| Centre de gravité | Bip001 (par défaut) | X, Y, Z | Fait tourner le bipède entier |
| Bassin | Bassin | X, Y, Z | Si les pieds sont solidement posés au sol, ajuste les jambes pour maintenir les pieds et les orteils au-dessus du sol. |
| Tête | Tête | X, Y, Z | |
| Cou | Cou | X, Y, Z | L'orientation du cou n'affecte pas celle de la tête |
| Colonne vertébrale | Colonne, Colonne 1-4 | X, Y, Z | La rotation de la colonne ajuste l'équilibre général |
| Queue | Queue, Queue1-4 | X, Y, Z | |
| Clavicules | Bras D, Bras G | Y, Z | L'orientation des épaules n'affecte pas celle des clavicules |
| Epaules (partie supérieure du bras) | Bras D, Bras G | X, Y, Z | Pivots en rotation de l'épaule au poignet |
| Coudes (partie inférieure du bras) | Avant bras D, Avant-bras G | X, Z | Charnière plus rotation spéciale |
| Hanches (partie supérieure de la jambe) | Cuisse D, Cuisse G | X, Y, Z | Pivots en rotation de la hanche à la cheville |
| Genoux (partie inférieure de la jambe) | Mollet D, Mollet G | X, Z | Charnière plus rotation spéciale |
| Mains | Main D, Main G | X, Y, Z | |
| Pieds | Pied D, Pied G | X, Y, Z | Si les pieds sont solidement posés au sol, ajuste les jambes pour maintenir les pieds et les orteils au-dessus du sol. |
| Doigts | Doigt0, 01, 02 Doigt1, 11, 12, etc. | X, Y, Z | Les bases des doigts ont trois axes libres tandis que les autres articulations des doigts ont uniquement l'axe des Z. |
| Orteils | Orteil0, 01, 02 Orteil1, 11, 12, etc. | X, Y, Z | Les bases des orteils ont trois axes libres tandis que les autres articulations des orteils ont uniquement l'axe des Z |
Bassin comme joint à rotule
Le bassin peut pivoter sur les trois axes : X, Y et Z. Ce joint à rotule assure trois degrés de liberté, améliorant la flexibilité de l'animation avec un bipède, car les rotations du bassin sont isolées de la rotation du centre de gravité (CdG). Le centre de GRAVITE doit donc présumer une trajectoire plus lisse, qui influence aussi la tête et les bras du bipède. Par conséquent, leurs mouvements paraissent plus naturels dans l'espace de rotation du centre de gravité du corps.
Il est important de connaître les changements de comportement résultants suivants :
- Le mouvement du bassin à trois degrés de liberté est affiché sous forme de courbes de fonction quaternionique ou Euleur distinctes dans l'Editeur de courbes et l'Atelier.
- L'utilisation de la réduction de clés sur la colonne vertébrale produit de meilleurs résultats.
- Les rotations sur les nouveaux axes du bassin (X et Z) sont marquées sur les couches et prises en charge par MAXScript.
- L'animation de pas paramétrique par défaut est légèrement ajustée pour utiliser le bassin à trois degrés de liberté.
- Si une archive de bipède héritée, tel qu'un fichier BIP, est chargée sur le bipède 3ds Max, les données de bassin liées sont adaptées aux nouveaux degrés de liberté et au nouvel espace de coordonnées correspondant à la rotation du bassin.
- A l'aide du mode Mixeur ou Séquence, les archives contenant de nouvelles pistes de rotation du bassin seront fusionnées avec les anciennes archives qui ne possèdent pas ces pistes.
Rotation spéciale : coudes et genoux
Les coudes et les genoux effectuent une rotation spéciale lorsque vous les faites pivoter autour de leur axe X. En fait, ils ne tournent pas réellement autour de cet axe, ceci n'aurait pas de sens puisqu'ils ont un seul degré de liberté. En fait, les parties supérieures et inférieures des bras et des jambes tournent ensemble autour d'un axe invisible, défini par la ligne allant de l'épaule au poignet et de la hanche à la cheville. Cette rotation spéciale peut se révéler très utile pour positionner les bras et les jambes.
La rotation spéciale peut également s'avérer utile pour créer des personnages avec des courbures de genoux inverses. Lorsque vous faites pivoter les genoux vers l'arrière de plus de 90 degrés par rapport à la position frontale des genoux humains, Bipède suppose que le personnage a des genoux vers l'arrière (ou des pattes d'oiseau) et le programme utilise cette information de référence pour tous lesmouvements .bip.
La rotation de l'avant-bras sur l'axe X fait tourner les parties du bras le long d'un axe invisible situé entre l'épaule et le poignet.
Equilibre : colonne vertébrale
Bipède utilise uniquement la colonne vertébrale et le centre de gravité pour maintenir l'équilibre du bipède. En conséquence, si vous faites pivoter tous les segments ou un segment quelconque de la colonne vertébrale, la position horizontale du corps change par rapport au centre de gravité. Ces ajustements sont effectués dans le système de coordonnées local du centre de gravité, ce qui permet au personnage de pivoter naturellement autour de son centre de gravité, par exemple pendant une pirouette en l'air.
Le panneau déroulant Infos sur les clés du groupe de fonctions Mouvement permet de désactiver ce comportement en affectant la valeur 0 au facteur d'équilibre des clés de centre de gravité horizontales correspondantes. La commande Facteur d'équilibre se trouve dans la zone Corps du panneau déroulant.
Orientation indépendante : bras, tête, pieds
La modification de l'orientation d'une clavicule (l'objet racine du bras) entraîne la modification de la position mais pas de l'orientation de la partie supérieure du bras. En fait, les clavicules constituent le support à partir duquel les bras sont suspendus.
De même, l'orientation du cou modifie la position mais pas l'orientation de la tête. Bien qu'étant liée au cou, la tête pivote en général indépendamment de celui-ci et l'interpolation de ces orientations définies de manière individuelle génère un mouvement paraissant plus naturel.
Comme pour la tête et les bras, la modification de l'orientation de la partie supérieure ou inférieure de la jambe entraîne la modification de la position mais non de l'orientation du pied correspondant. L'orientation du pied reste ainsi relative au plan horizontal.
Ajustement des clés à la rotation TCA
Au lieu de créer d'autres clés pour affiner l'animation des membres, vous pouvez utiliser les paramètres TCA pour définir le fondu en entrée, le fondu en sortie et la trajectoire des membres pour des clés existantes.
Visualisation des animations de rotation avec les courbes de fonction
Une autre méthode de visualisation de l'animation consiste à utiliser l'Editeur de courbes. Chaque clé que vous ajoutez est affichée et connectée à d'autres clés, créant une courbe qui représente votre animation. Vous pouvez utiliser le Contrôleur Rotation TCA ou le Contrôleur Euler XYZ (dans le panneau déroulant Quaternion/Euler) pour afficher votre courbe de rotation au format Quaternion ou Euler. Chaque contrôleur affecte la courbe différemment, en fonction de calculs de rotation distincts. Pour en savoir plus, reportez-vous à la rubrique Utilisation de courbes Euler avec les animations de bipède.
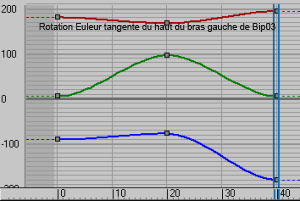
Courbe de rotation Euler tangente
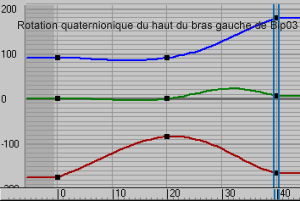
Courbe de rotation Quaternion
Procédures
Modification des paramètres TCA d'un bras de bipède
- Dans le panneau déroulant Info clé, cliquez sur
 (Trajectoires).
(Trajectoires). -
 Sélectionnez un bras du bipède.
Sélectionnez un bras du bipède. - Cliquez sur
 (Clé suivante) ou
(Clé suivante) ou  (Clé précédente) pour sélectionner une clé de bras.
(Clé précédente) pour sélectionner une clé de bras. - Si le groupe TCA n'apparaît pas déjà, cliquez sur le séparateur TCA.
- Modifiez les paramètres Tension, Continuité et Altération.
La trajectoire change en tenant compte des nouveaux paramètres. Jouez l'animation pour visualiser la modification.
Conseil : vous pouvez également accéder aux commandes TCA en cliquant avec le bouton droit sur les clés situées sur la barre de piste, dans la Vue piste – Editeur de courbes ou dans la vue des courbes de l'Atelier.