部件关系
在 Fusion 的“设计”工作空间中,您可以在零部件之间创建不同类型的关系,以定义它们在部件中的相对位置、自由度和运动。
使用“设计”>“装配”面板中的以下工具创建和修改零部件之间的关系:
- 约束零部件
 :约束几何图元以相对于彼此放置两个或更多零部件,减少部件中的自由度,并在涉及的零部件之间创建约束关系。
:约束几何图元以相对于彼此放置两个或更多零部件,减少部件中的自由度,并在涉及的零部件之间创建约束关系。 - 联接
 :在尚未相对于彼此定位的零部件之间创建联接。
:在尚未相对于彼此定位的零部件之间创建联接。 - 快速联接
 :在已相对于彼此定位的零部件之间创建联接。
:在已相对于彼此定位的零部件之间创建联接。 - 联接原点
 :在零部件上创建和放置一个坐标系,您以后可使用它来定义部件关系。
:在零部件上创建和放置一个坐标系,您以后可使用它来定义部件关系。 - 刚性组
 :将零部件锁定在一起,以便它们在部件中一起移动。
:将零部件锁定在一起,以便它们在部件中一起移动。 - 传动联接
 :修改联接运动输入(例如旋转角度和距离)以控制自由度。
:修改联接运动输入(例如旋转角度和距离)以控制自由度。 - 运动链接
 :将 2 个联接的运动链接在一起。
:将 2 个联接的运动链接在一起。
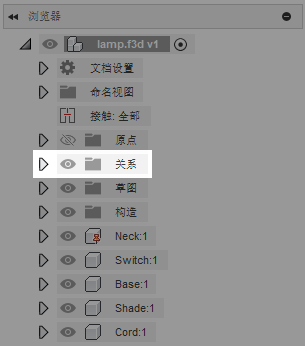
当您在零部件之间创建新关系时,它将显示在“浏览器”>“关系”文件夹中。
部件约束
约束是一种部件关系,用于约束几何图元以相对于彼此放置两个或更多零部件。
使用约束可锁定可用的自由度 (DOF) 并降低零部件关系的复杂性。您可以一次创建多个约束以创建集。
约束访问点
您可以通过两个访问点与部件约束进行交互:
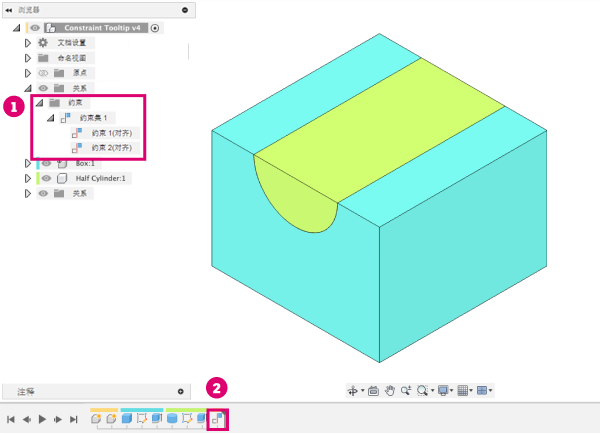
- 在浏览器的“关系”>“约束”文件夹中。
- 在时间轴中。
联接
联接是一种机械部件关系,用于定义部件中两个零部件之间的相对位置和运动。您可以使用联接原点(自定义坐标系)将零部件拼合在一起。
在设计包含运动零部件的部件时,仿真运动是原型制作过程中非常重要的一部分。
在 Fusion 中,部件关系能够帮助您专注于零部件可以做些什么,而不是它们不能做些什么,从而降低零部件关系的复杂性。这不同于约束或配合等其他方法,这些方法会锁定可用的自由度 (DOF) 来限制运动。这需要您了解涉及的基本物理和数学知识,以确保部件中的零部件按照您预期的方式移动。
相反,联接定义零部件之间的运动,并且仅开放所需的自由度以创建该运动。这样可以简化了解物理学知识的需求,并促进对运动和结果之间关系的了解。
联接访问点
我们可以通过 3 个访问点与您在部件中创建的联接交互:
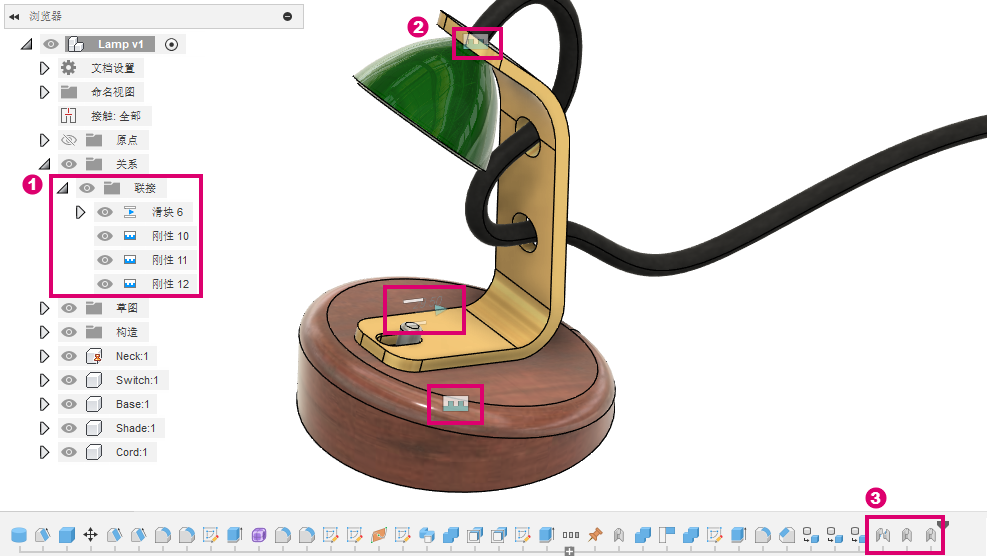
- 在浏览器的“关系”>“联接”文件夹中。
- 在画布中,直接在零部件上,由联接类型图标来标明。
- 在时间轴中。
注意:在浏览器中,每个子部件都有自己的“联接”文件夹,其中包含子部件中零部件之间的所有联接。
您可以在画布或浏览器中的任何现有联接上单击鼠标右键,然后使用以下附加工具来对其进行修改:
- 编辑联接:打开“编辑联接”对话框,允许您编辑与联接关联的所有设置。
- 编辑联接限制:打开“编辑联接限制”对话框,并允许您编辑联接的最小限制、最大限制和静止限制。
- 锁定:锁定联接的当前位置和设置。
- 抑制:暂时删除联接以防止其作用于零部件。
- 动画演示联接:动画演示单个联接。
- 制作模型动画:为部件中的所有联接制作动画。
选择零部件
在“浏览器”>“关系”中,可以在约束或联接上单击鼠标右键,然后选择“选择零部件”以自动亮显关系中涉及的零部件。
联接和约束
联接和约束是两种作用强度不同的装配关系。您可搭配使用二者完成零部件装配。
您还需了解二者在创建逻辑上的区别:
- 对于联接,当您选择除“刚性”以外的任意运动类型时,会相对于捕捉点开放自由度。
- 运动限制:为已开放的自由度设定运动范围。不同类型的联接,开放的自由度数各不相同。例如,圆柱联接可分别设置旋转和滑动的运动范围,而旋转联接仅具备旋转自由度。
- 对于标准约束,通过绑定几何图元来限制零部件之间的自由度。
- 偏移限制:设定零部件在偏移方向上可移动的范围。例如对于“角度约束,您可以指定角度的最小值与最大值。