
Rigid body motion
Rigid-body motion describes how a body moves in a 3D space. There are six degrees of freedom in a 3D space: 3 translations and 3 rotations.
Translational degrees of freedom include:
- Moving backwards and forwards on the X-axis
- Moving left and right on the Y-axis
- Moving up and down on the Z- axis
Rotational degrees of freedom include:
- Tilting from side to side on the X-axis
- Pitching forwards and backwards on the Y-axis
- Turning left and right on the Z-axis
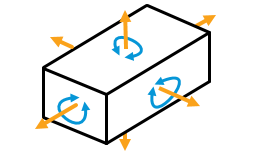
Translational degrees of freedom (orange) and rotational degrees of freedom (blue)
This means that the minimum number of constrained degrees of freedom that must be set in the model to prevent rigid body motion is also six. When undertaking structural analyses, any system of constraints can be used, providing it prevents rigid-body motion.
Even when the loads acting on a model are balanced, the solution is not statically stable without constraints. This is because a finite element analysis (FEA) model is a discretized approximation of the actual model, so slight mathematical imbalances are introduced when the model is divided into multiple elements.
Unless the model is fully constrained, even with balanced loads, activate Remove rigid body modes to achieve equilibrium in the solution and prevent any rigid-body motion.