| Acceso: |
En el cuadro de diálogo Insertar unión, pulse el icono Mostrar tabla de uniones. |
Pulse las imágenes de la sección superior del cuadro de diálogo para pasar de una categoría de unión a otra.
Uniones estándar
Las uniones estándar son las más usadas. Estas uniones están basadas en distintas combinaciones de grados de libertad de rotación y traslación. Las uniones disponibles en esta categoría son las siguientes:
![]() Revolución
Revolución
![]() Prismática
Prismática
![]() Cilíndrica
Cilíndrica
![]() Esférica
Esférica
![]() Plana
Plana
![]() Punto-Línea
Punto-Línea
![]() Línea-Plano
Línea-Plano
![]() Punto-Plano
Punto-Plano
![]() Espacial
Espacial
![]() Soldadura
Soldadura
Uniones giratorias
Aunque las imágenes indican que las uniones se pueden utilizar para simular mecanismos de engranaje, la malla real de los dientes del engranaje no se tiene en cuenta. El método establece un coeficiente basado en geometría seleccionada para el radio giratorio efectivo de los engranajes.
![]() Giro: cilindro sobre plano
Giro: cilindro sobre plano
![]() Giro: cilindro sobre cilindro
Giro: cilindro sobre cilindro
![]() Giro: cilindro en cilindro
Giro: cilindro en cilindro
![]() Giro: curva de cilindro
Giro: curva de cilindro
![]() Correa
Correa
![]() Giro: cono sobre plano
Giro: cono sobre plano
![]() Giro: cono sobre cono
Giro: cono sobre cono
![]() Giro: cono en cono
Giro: cono en cono
![]() Tornillo
Tornillo
![]() Engranaje helicoidal
Engranaje helicoidal
Uniones deslizantes
![]() Deslizamiento: cilindro sobre plano
Deslizamiento: cilindro sobre plano
![]() Deslizamiento: cilindro sobre cilindro
Deslizamiento: cilindro sobre cilindro
![]() Deslizamiento: cilindro en cilindro
Deslizamiento: cilindro en cilindro
![]() Deslizamiento: curva de cilindro
Deslizamiento: curva de cilindro
![]() Deslizamiento: curva de punto
Deslizamiento: curva de punto
Unión de contacto
La unión de contacto 2D es muy precisa. Detecta cuándo se produce una colisión y, a la vez, permite la separación. Como las superficies no tienen facetas y no se penetran, es menos probable que se produzcan anomalías en los resultados. Si trabaja con mecanismos como levas y seguidores, use estas uniones, en lugar de las uniones de contacto 3D, para investigar con exactitud el funcionamiento del mecanismo. En ciertos casos, deberá crear geometría adicional sobre una pieza o usar varias uniones 2D para obtener el resultado deseado.
![]() Contacto 2D
Contacto 2D
Modificación de la geometría para garantizar un bucle continuo sin interrupciones.
Para poder ofrecer un bucle continuo sin interrupciones en el algoritmo de contacto 2D (y mejorar el cálculo), se llevan a cabo pequeñas modificaciones en la geometría. Cualquier discontinuidad del perfil se anula para permitir un bucle continuo y facilitar que el software pueda resolver el contacto rápidamente. En el siguiente ejemplo se ilustra lo que ocurre en el software.
 |
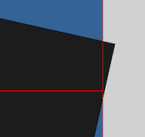
El ejemplo es un bloque con caras planas en contacto con otro componente con caras que no son paralelas a las caras del bloque. A primera vista, parece que los vectores del contacto (en rojo) tienen el aspecto esperado. |
 |
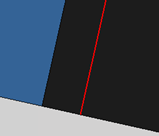
Si nos acercamos al área del contacto en las caras no paralelas, se aprecia que hay cierta superposición en el contacto. |
 |
Si nos acercamos al área de contacto de la cara paralela, se aprecia la imagen de la izquierda. |
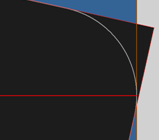 |
Esto sucede porque Simulación dinámica crea automáticamente empalmes o vértices sin discontinuidades, tal como se muestra en la imagen de la izquierda. Como puede ver, el contacto tiene una precisión exacta con respecto al empalme. |
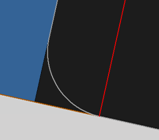 |
En el caso de la unión con caras paralelas, el contacto también tiene una precisión exacta con respecto al empalme. |
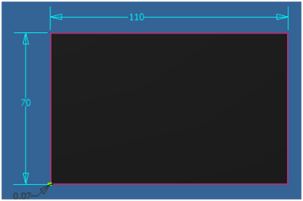 |
El software crea el empalme siguiendo este método:
Si se alcanza el valor mínimo de 5e-6 mm, el vértice no se suaviza. En el ejemplo de la izquierda, Lmin = 70 mm y el ángulo es perpendicular (90 grados), por lo que el radio es 0,07 mm. |
Uniones de fuerza
![]() Contacto 3D
Contacto 3D
![]() Muelle/amortiguador/conector
Muelle/amortiguador/conector
| Type | Parámetros | Mostrar | Comentarios |
|---|---|---|---|
| Muelle helicoidal | Rigidez, Longitud libre, Amortiguamiento | Muelle helicoidal | Tipo por defecto. La fuerza depende de la distancia entre los 2 puntos (rigidez y longitud libre) y de la velocidad entre ellos (amortiguamiento). |
| Muelle | Rigidez, Longitud libre, Amortiguamiento | cilindros separados, apilados | La misma acción que en el muelle helicoidal. La visualización se asemeja en cierto modo a las arandelas de muelle cónico y se mejora el tiempo de visualización. |
| Amortiguador de muelle | Rigidez, Longitud libre, Amortiguamiento | Muelle helicoidal y amortiguador | La misma acción que en el muelle helicoidal. La visualización es similar a un amortiguador de impactos de un coche. |
| Amortiguador | Amortiguamiento | Amortiguador | Sólo una acción de amortiguamiento. La fuerza depende de la velocidad entre los dos puntos. |
| Conector | Gráfico de entrada o Constante | Amortiguador | Aplica el parámetro de la fuerza directamente al modelo. El gráfico muestra un mecanismo de tipo de conector. |