| Mode d'accès : |
Dans la boîte de dialogue Insérer une liaison, cliquez sur l'icône Afficher la table des liaisons. |
Cliquez sur les images situées dans la partie supérieure de la boîte de dialogue pour passer d'une catégorie de liaison à l'autre.
Liaisons standard
Les liaisons standard sont les liaisons les plus couramment utilisées. Elles reposent sur différentes combinaisons de degrés de liberté de rotation et de translation. Les liaisons disponibles dans cette catégorie sont les suivantes :
![]() Pivot
Pivot
![]() Glissière
Glissière
![]() Pivot glissant
Pivot glissant
![]() Rotule
Rotule
![]() Plan
Plan
![]() Linéaire annulaire
Linéaire annulaire
![]() Linéaire rectiligne
Linéaire rectiligne
![]() Ponctuelle
Ponctuelle
![]() Spatiale
Spatiale
![]() Soudure
Soudure
Liaisons roulantes
Bien que les images indiquent que les liaisons peuvent servir à simuler les mécanismes d'engrenage, le maillage réel des dents d'engrenage n'est pas pris en compte. La méthode établit un rapport basé sur la géométrie sélectionnée pour le rayon de roulement effectif des roues.
![]() Roulement : cylindre sur plan
Roulement : cylindre sur plan
![]() Roulement : cylindre sur cylindre
Roulement : cylindre sur cylindre
![]() Roulement : cylindre dans cylindre
Roulement : cylindre dans cylindre
![]() Roulement : cylindre-courbe
Roulement : cylindre-courbe
![]() Courroie
Courroie
![]() Roulement : cône sur plan
Roulement : cône sur plan
![]() Roulement : cône sur cône
Roulement : cône sur cône
![]() Roulement : cône dans cône
Roulement : cône dans cône
![]() Vis
Vis
![]() Engrenage à vis sans fin
Engrenage à vis sans fin
Liaisons coulissantes
![]() Coulissement : cylindre sur plan
Coulissement : cylindre sur plan
![]() Coulissement : cylindre sur cylindre
Coulissement : cylindre sur cylindre
![]() Coulissement : cylindre dans cylindre
Coulissement : cylindre dans cylindre
![]() Coulissement : cylindre-courbe
Coulissement : cylindre-courbe
![]() Coulissement : point-courbe
Coulissement : point-courbe
Liaisons de contact
Les liaisons de contact 2D sont précises. Elles permettent non seulement de détecter une collision, mais également d'effectuer des séparations. Comme les surfaces n'ont pas de facettes et sont sans pénétration, les risques d'anomalies dans les résultats sont moindres. Lorsque vous travaillez avec des mécanismes tels que des cames ou des contres-came, utilisez ces liaisons plutôt que des liaisons de contact 3D pour étudier avec précision le comportement du mécanisme. Dans certains cas, vous devez créer une géométrie supplémentaire sur une pièce ou utilisez plusieurs liaisons 2D pour obtenir les résultats adéquats.
![]() Contact 2D
Contact 2D
Modification de la géométrie pour obtenir un contour fermé continu "lissé".
Pour fournir à l'algorithme de contact 2D un contour fermé continu lissé (pour améliorer le calcul), une légère modification de la géométrie est opérée. Toute discontinuité détectée dans le profil est lissée afin d'obtenir un contour fermé continu qui permet au logiciel de résoudre rapidement le contact. L'exemple ci-après illustre les opérations effectuées par le logiciel.
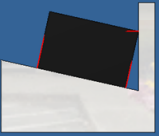 |
L'exemple concerne un bloc doté de faces planes, en contact avec un autre composant dont certaines faces ne sont pas parallèles aux faces du plan. De loin, les vecteurs de contact ressemblent à ce que l'on peut attendre. |
 |
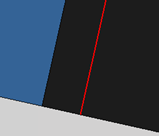
En effectuant un zoom avant sur la zone de contact des faces non parallèles, l'on constate qu'il existe un léger chevauchement dans le contact. |
 |
En agrandissant la zone de contact de la face parallèle, on retrouve l'illustration ci-contre. |
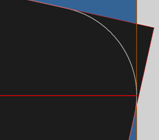 |
Cette condition survient parce que la simulation dynamique crée automatiquement des congés ou coins lissés, comme le montre l'image ci-contre. Vous pouvez constater que le contact est exact par rapport au congé. |
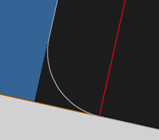 |
Dans le cas des liaisons de faces parallèles, le contact est également exact par rapport au congé. |
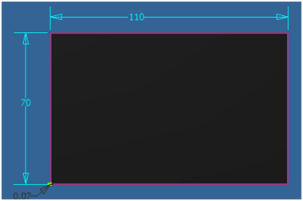 |
Le logiciel crée le congé selon la méthode suivante :
Si la valeur minimale de 5e-6 mm est atteinte, le sommet n'est pas lissé. Dans l'exemple présenté, Lmin = 70 mm et l'angle est perpendiculaire (90°) ; par conséquent le rayon est égal à 0.07 mm. |
Liaisons de force
![]() Contact 3D
Contact 3D
![]() Ressort / Amortisseur / Vérin
Ressort / Amortisseur / Vérin
| Type | Paramètres | Afficher | Commentaires |
|---|---|---|---|
| Ressort spiral | Rigidité, Longueur libre, Amortissement | Ressort spiral | Type par défaut. La force dépend de la distance entre les deux points (rigidité et longueur libre) et de la vitesse entre eux (amortissement). |
| Ressort | Rigidité, Longueur libre, Amortissement | cylindres empilés, séparés | Action identique au ressort spiral. L'affichage est proche d'une rondelle Belleville et le temps d'affichage optimisé. |
| Amortisseur à ressort | Rigidité, Longueur libre, Amortissement | Ressort spiral et amortisseur | Action identique au ressort spiral. L'affichage ressemble à un amortisseur automobile. |
| Amortisseur | Amortissement | Amortisseur | Action d'amortissement uniquement. La force dépend de la vitesse entre les deux points. |
| Vérin | Graphique d'entrée ou Constante | Amortisseur | Applique le paramètre de force directement au modèle. Le graphique illustre un mécanisme de type vérin. |