L'objectif du système de cinématique inverse de CAT, appelé CI contrôlée par CA, consiste à vous permettre d'interagir de façon intuitive avec l'ossature de votre personnage, sans vous soucier de CI et de CA.
Le système considère les rotations CA d'un membre, puis les adapte à la cible CI. Cette approche flexible inclut une prise en en charge des chaînes CI pivotant sur n'importe quel axe, et pas uniquement une comme avec d'autres systèmes CI. Il est facile de créer des composants personnalisés, comme des contraintes, pour personnaliser la manière dont le système fonctionne.
Configuration de la chaîne CI
Pour configurer les os de la chaîne CI, il suffit de déplacer et de faire pivoter les os dans la configuration requise. Il n'existe aucune limite dans la direction dans laquelle vous faites pivoter les os.
Le fait que la solution CI soit dérivée de la solution CA signifie qu'en mode de configuration il est essentiel de conserver les configurations CI et CA aussi proches que possible l'une de l'autre. Une astuce consiste à cliquer sur le bouton Faire correspondre CI et CA avant de modifier le membre dans CI. Pour des membres complexes, tels que ceux d'une araignée, il est recommandé de placer le membre dans CA, en activant l'option CI uniquement lorsque vous avez terminé.
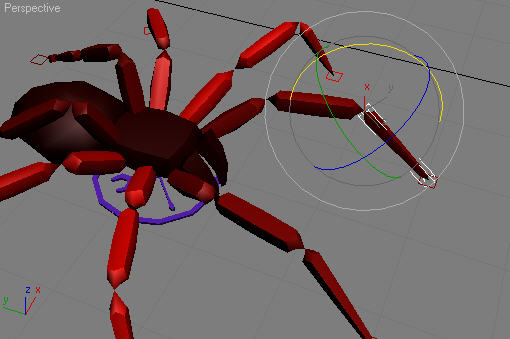
Avec des membres complexes, faites pivoter les os en mode CA, de sorte qu'ils se trouvent sur FootPlatform.
Vous pouvez faire pivoter les os du membre sur n'importe quel axe. Vous pouvez utiliser des chaînes CI de jambes arquées pour des cowboys prêts à dégainer.
La différence entre l'utilisation de CI et de CA
La différence entre CI et CA dans CAT est minime. La manière dont un membre se comporte lorsqu'il est manipulé est à peu près la même dans CI et dans CA. La seule différence est qu'en mode CI, l'extrémité enfant du membre, par exemple la paume, essaie toujours de suivre la cible CI. Dans le mode CA, le membre n'est pas soumis à cette restriction.
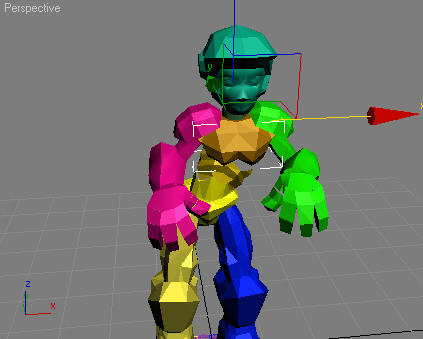
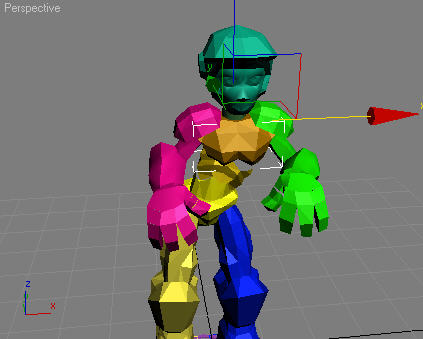
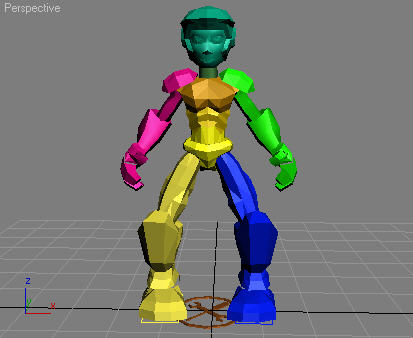
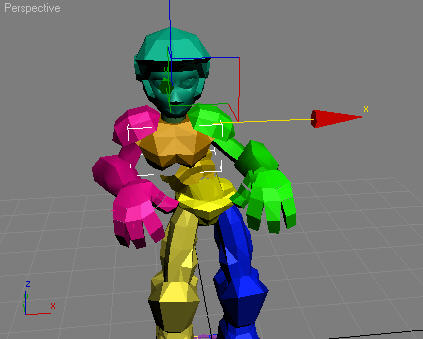
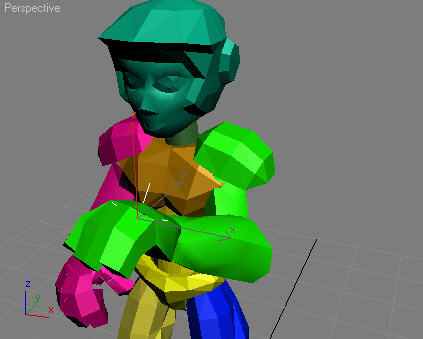
Lorsque la cage thoracique est déplacée d'un côté à un autre avec les bras en mode CA, ces derniers se contentent de se déplacer avec la cage thoracique.
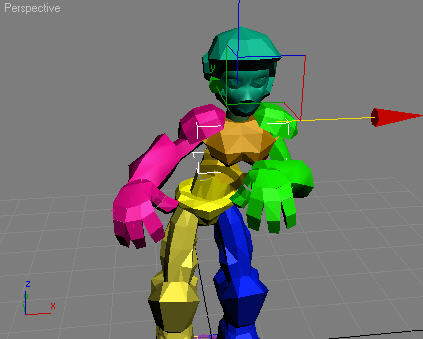
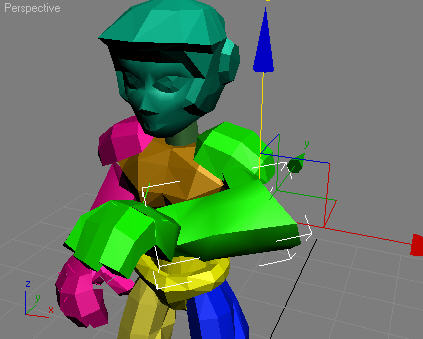
Avec les bras en mode CI, les mains restent en place durant la transformation de la cage thoracique.
Cas d'utilisation du mode CI
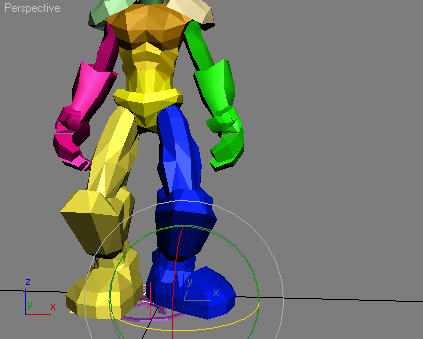
Utilisez le mode CI lorsqu'un membre doit avoir une position de fin fixe. L'exemple le plus courant est celui de l'animation de jambes marchant, dans lesquelles les pieds doivent être posés sur le sol et ne doivent pas glisser lorsque vous faites pivoter les os de la jambe. Parmi les autres exemples, on peut citer des bras s'accrochant à d'autres objets tels que des pistolets ou des volants.
Comment le système CI de CAT est-il supposé se comporter?
Déplacement de la cible CI
Comme pour tout système CI, lorsque vous déplacez la cible CI, la chaîne CI conserve sa configuration d'origine autant que possible.
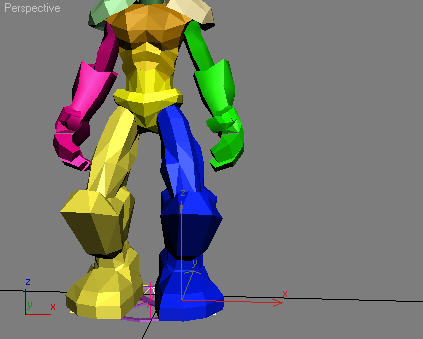
A mesure que la cible CI de la jambe se déplace, le membre conserve la configuration de base de la jambe autant que possible.
Rotation de la cible CI
Vous serez peut-être surpris de voir que la rotation de la cible CI ne fait pas pivoter le membre. Même si au premier abord cela peut vous paraître étrange, vous verrez que ce processus permet de rendre le système CI de CAT réellement plus flexible et qu'il ne pose aucun problème.
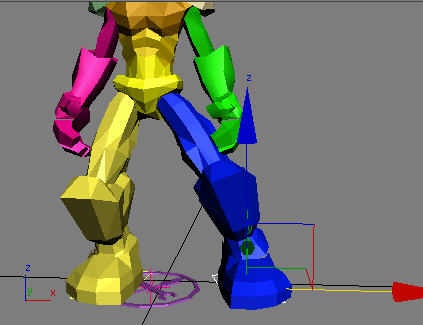
Lorsque vous faites pivoter la cible CI, seule la cheville pivote. Le reste du membre n'est pas affecté.
Une méthode simple pour y remédier est de simplement faire pivoter la partie supérieure de l'os de la jambe séparément (reportez-vous à la rubrique Affiner les rotations des os des membres pendant l'animation, ci-dessous). Une autre solution consiste à contraindre les rotations du haut de la jambe à FootPlatform.
Affiner les rotations des os des membres pendant l'animation
Lorsque vous animez la cible CI, vous pouvez ajuster l'orientation exacte des os dans la chaîne CI. Avec CAT, il suffit simplement faire pivoter les structures dans la fenêtre, comme vous le souhaitez.
La main a été déplacée vers le haut, mais le coude est trop bas. Il suffit de tirer le coude vers le haut.
Aligner cible
La valeur Aligner cible vous permet de contrôler si la paume hérite des rotations de la cible CI ou non.
Lorsque la valeur Aligner cible est définie sur 0,0, la paume se déplace avec la cible CI mais reste alignée sur le dernier os du membre (avant-bras sur un être humain).