弾道足並みは、いずれの足も地面に接地していない期間があり、このため Biped が空中にあるような(弾道のような)任意の足跡パターンになります。走行とジャンプは弾道足並みですが、歩行は弾道足並みではありません。
[ダイナミック & 適合](Dynamics & Adaptation)ロールアウトの[Biped ダイナミック](Biped Dynamics)をオンにして足跡をアクティブ化すると、弾道足並み期間に自動的に生成された[ボディ垂直方向](Body Vertical)キーに重力と着地スピードが反映されます。この項で説明するパラメータは、このようにして[ボディ垂直方向](Body Vertical)キーに影響を及ぼします。
滞空ダイナミック
足跡では、滞空時間は常に[ボディ水平方向](Body Horizontal)キーと[ボディ垂直方向](Body Vertical)キーで開始および終了します。これらのキーは、Biped の跳躍時と着地時の位置を定義します。
Biped が空中にいるとき、[Biped ダイナミック](Biped Dynamics)がオンになっていると、その垂直モーションは物理的なダイナミックによって制御されます。その空中における軌道は、現在の重力の設定、跳躍と着地における[ボディ垂直方向](Body Vertical)キーの高さ、および空中での時間に基づいています。
既定値では、Biped の軌道の頂点に[ボディ垂直方向](Body Vertical)キーは存在しません。Biped が空中にいるときの頂点の高さは自動的に計算され、適用されます。たとえば、Biped の軌道の頂点に[ボディ垂直方向](Body Vertical)キーを設定して、Biped を上下させることはできません。この操作実行すると、Biped が空中にいるときの元の高さに戻ります。このとき、[トラック](Track)バーとトラック ビュー上に[ボディ垂直方向](Body Vertical)キーが表示されますが、このキーは Biped が空中にいるときの高さに影響を及ぼしません。
重力とタイミング
現実の状況では、人間、動物、昆虫などがジャンプしたときの滞空時間は、次の 2 つの要因で決定されます。
- ジャンプの高さは、ジャンプするときの足の踏み切りの強さによって決定します。ジャンプする生物の重量は、ジャンプ時に上手に踏み切れるかどうかという点には関係していますが、ジャンプの高さとは関係がありません。非常に軽いキャラクタは風の影響により滞空時間が長くなる場合がありますが、重力方程式ではこれを考慮しません。
- その生物がジャンプする惑星の重力
この 2 つの要因から、生物の滞空時間を計算できます。この計算の逆も行うこともできます。つまり、生物の滞空時間と惑星の重力方程式からジャンプの高さを算定することができます。
滞空時間が長くなればなるほど、ジャンプの高さは高くなる
character studio では、後者の方法で Biped のジャンプの高さを計算します。Biped の滞空時間は足跡のタイミングから計算されます。さらにシーン内の「重力の引っ張り」を決定することもできます。
character studio の既定値の重力設定は、地球の重力を計算する標準方程式(加速度 32 フィート/秒/秒)に基づいています。この方程式を使用するときは正確な距離の情報が必要です。Biped の高さはシーン内の実際の距離のガイドとして使用されます。重力を計算する場合、Biped の高さは、平均的な男性の身長である 5 フィート 10 インチと想定されます。
もちろん、この平均値が当てはまらないキャラクタもあります。こうしたキャラクタの滞空時間は正確に計算されないので、ジャンプの高さが予測どおりにならないことがあります。
この問題の解決方法は 2 通りあります。1 つはキャラクタの滞空時間を変更する方法(「足跡のタイミングの編集」を参照)、もう 1 つは[重力加速](GravAccel)パラメータを使って重力を加速する方法です。
重力の加速
[ダイナミック & 適合](Dynamics & Adaptation)ロールアウトの[重力加速](GravAccel)パラメータによって、アクティブな足跡と足跡の間の Biped の滞空時間で決定付けられる重力の引っ張りの度合いが変化します。
[重力加速](GravAccel)の既定値は、地球の重力と、その重力が平均的な身長の人間に及ぼす影響を算出する標準的な計算式によって決定されます。[重力加速](GravAccel)パラメータの値が大きくなればなるほど、重力の影響は小さくなり、Biped のジャンプの高さは高くなります。[重力加速](GravAccel)パラメータは、シーン内の Biped ごとに設定できます。
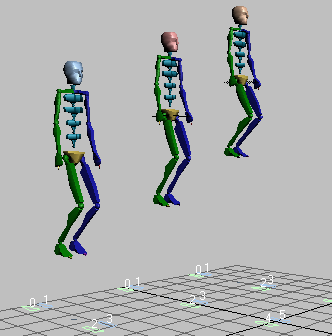
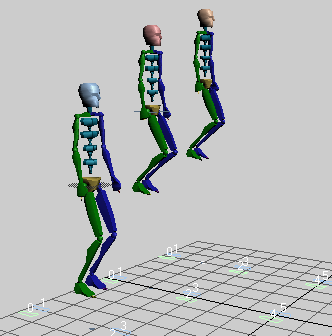
[重力加速](GravAccel)値を大きくするとジャンプの高さが高くなる
(左 = 500、中央 = 1000、右 = 1500)
[重力加速](GravAccel)の値はアニメートのプロセス中いつでも変更でき、既存のキーとまだ作成されていないアニメーションの両方について、Biped の垂直方向の滞空モーションを変化させることができます。この値はアニメートできません。Biped の足跡シーケンスを通して、現在の[重力加速](GravAccel)値が使用されます。
[重力加速](GravAccel)パラメータの値を変更しても、Biped の滞空時間には影響はありません。
タッチとリフトのダイナミック
滞空時間を含む足跡パターンの足跡をアクティブ化すると、タッチおよびリフト キーフレームごとに[ボディ垂直方向](Body Vertical)キーが設定されます。
character studio は、滞空時間と Biped の高さに基づいて、Biped のジャンプの高さを計算します。これにより、リフト フレームで Biped がこの高さに達するためにどのくらい足に力を入れなければならないか、タッチ フレームで着地するときの衝撃を吸収するためにどのくらい足を曲げなければならないかが計算されます。これに従って、リフト フレームとタッチ フレームで[ボディ垂直方向](Body Vertical)キーが設定されます。
タッチとリフトのダイナミックのタイミングを調整するには、次のようにします。
- タッチ フレームとリフト フレームで[ボディ垂直方向](Body Vertical)キーを変更します。
- 足跡操作中に[ボディ垂直方向](Body Vertical)キーを設定、変更または削除します。
- [弾道の張力](Ballistic Tension)パラメータを使って、タッチ フレームとリフト フレームの Biped の脚の剛度(張り)を変更します。
弾道の張力
ジャンプの開始時に Biped の足が地面から離れる瞬間、またはジャンプの終了時に Biped の足が着地する瞬間の剛度(張り)を「弾道の張力」と呼びます。Biped のモーションを変更するには、弾道の張力のパラメータを滞空時間の直前または直後の足跡に設定します。
[弾道の張力](Ballistic Tension)パラメータは、ボディが着地([タッチ](Touch)キー)または跳躍([リフト](Lift)キー)する[ボディ垂直方向](Body Vertical)キーフレームでのみ編集可能です。[モーション](Motion)パネルの[トラックの選択](Track Selection)ロールアウトで[ボディ垂直方向](Body Vertical)を選択していることと、現在のフレームにキーが存在することが条件になります。[ボディ垂直方向](Body Vertical)キーは、着地する足跡のタッチ フレームと地面から離れる足跡のリフト フレームで自動的に設定されます。
[弾道の張力](Ballistic Tension)の値の範囲は 0 から 1 です。既定値は 0.5 です。[弾道の張力](Ballistic Tension)の値を 1.0 にすると、跳躍時または着地時の脚が堅くなります。値を 0.0 に下げると、脚の弾性が増し、堅さが減少します。
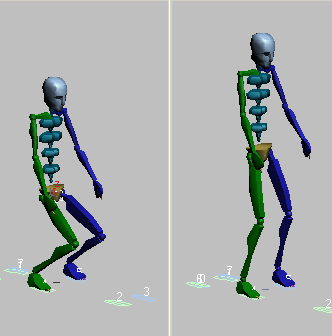
着地時の張りは弾道の張力によって決定される
(左 = 0.0、右 = 1.0)
ダイナミック ブレンド
滞空中に Biped ダイナミックを使用するかスプライン ダイナミックを使用するかは、[ダイナミック & 適合](Dynamics & Adaptation)ロールアウトのダイナミック ブレンド パラメータによって決定されます。
Biped ダイナミックでは、滞空中の Biped の高さと軌道は、重力とその他の Biped 固有の情報によって決定されます。
スプライン ダイナミックでは、滞空中の Biped の高さと軌道は、キーフレームを使って手動で設定する必要があります。
ダイナミック ブレンドの値を 1 にすると、Biped ダイナミックが使用されます。値を 0 にするとスプライン ダイナミックが使用されます。ダイナミック ブレンドの値をアニメートし、アニメート中に使用するダイナミックを変更することができます。
手順
垂直方向の重心キーを配置するには:
- Biped の任意のパーツを
 選択し、
選択し、 [モーション](Motion)パネルを開きます。
[モーション](Motion)パネルを開きます。 - [トラックの選択](Track Selection)ロールアウトで
 ([ボディ垂直方向](Body Vertical))をクリックします。
([ボディ垂直方向](Body Vertical))をクリックします。 - [キー情報](Key Info)ロールアウトで
 ([次のキー](Next Key))または
([次のキー](Next Key))または  ([前のキー](Previous Key))を使用して、次または前の重心の[ボディ垂直方向](Body Vertical)キーフレームに移動します。 ヒント: 選択した垂直方向の COM キーが滞空時間からの着地キーの場合、[キー情報](Key Info)ロールアウトで[弾道の張力](Ballistic Tension)パラメータを変更し、膝の曲がりを制御できます。[表示](Display)ロールアウトで[軌道](Trajectories)をオンにすると軌道に影響するパラメータの変更が表示されます。
([前のキー](Previous Key))を使用して、次または前の重心の[ボディ垂直方向](Body Vertical)キーフレームに移動します。 ヒント: 選択した垂直方向の COM キーが滞空時間からの着地キーの場合、[キー情報](Key Info)ロールアウトで[弾道の張力](Ballistic Tension)パラメータを変更し、膝の曲がりを制御できます。[表示](Display)ロールアウトで[軌道](Trajectories)をオンにすると軌道に影響するパラメータの変更が表示されます。
ボディ垂直方向キーを設定するには:
- [トラックの選択](Track Selection)ロールアウトで ([ボディ垂直方向](Body Vertical))をクリックします。
 をオンにします。
をオンにします。 - メイン ツールバーの
 ([選択して移動](Select And Move))をクリックします。
([選択して移動](Select And Move))をクリックします。 - ビューポート内で重心をクリックして上下にドラッグします。
Biped の垂直方向の位置が変更され、重心のボディ垂直方向トラックにキーが作成されます。
弾道の張力を設定するには:
- [Biped]ロールアウトで
 ([足跡モード](Footstep Mode))をオフにします(オンになっている場合)。
([足跡モード](Footstep Mode))をオフにします(オンになっている場合)。 - [トラックの選択](Track Selection)ロールアウトで ([ボディ垂直方向](Body Vertical))をクリックします。
- 調整したい[垂直方向](Vertical)トラック キーフレームを[タッチ](Touch)キーまたは[リフト](Lift)キーに移動します。
[弾道の張力](Ballistic Tension)パラメータは[タッチ](Touch)キーおよび[リフト](Lift)キーでしか使用できません。
- [キー情報](Key Info)ロールアウトで[ボディ](Body)バーを展開し、[弾道の張力](Ballistic Tension)パラメータを表示します。
- [弾道の張力](Ballistic Tension)の値を調整します。
弾道の張力を調整すると、ジャンプ前のしゃがみ込みの量と、着地後の緩衝の量が変わります。
複数の[ボディ垂直方向](Body Vertical)キーのダイナミック ブレンドを変更するには:
- [グラフ エディタ](Graphs Editors)メニュー
 [トラックビュー - ドープ シート](Track View Dope Sheet)を選択します。
[トラックビュー - ドープ シート](Track View Dope Sheet)を選択します。 - 変更する[ボディ垂直方向](Body Vertical)キーをすべて選択します。
- 選択したキーの 1 つを右クリックして TCB (テンション/連続性/バイアス)のダイアログ ボックスを表示します。これは興味深いことです。
- [TCB]ダイアログ ボックスで[ダイナミック ブレンド](Dynamics Blend)の値を変更します。これにより、選択したすべてのキーの値が変更されます。 注: これは、足跡アニメーションの滞空時間の Biped のみに影響します。歩行モーションのダイナミック ブレンド キーを変更しても、モーションに影響はありません。