O Solucionador de HI (Independente de histórico) não se baseia em soluções de cinemática inversa calculadas nos quadros-chave anteriores na linha de tempo e, portanto, tem a mesma velocidade no quadro 2000 como no quadro 20.
O Solucionador de HI usa uma meta para animar uma cadeia. Você anima a meta e o solucionador de cinemática inversa tenta mover o atuador (o ponto de giro da última junção da cadeia) para corresponder à posição do objetivo. Frequentemente, a meta é compartilhada com outros objetos de controle, como pontos ou fictícios, splines ou ossos, e esses objetos de controle, por sua vez, são conectados a controles deslizantes de viewport ou de implementação.
A solução de cinemática inversa ocorre em um plano conhecido como plano de solucionador. O ângulo do plano do solucionador em espaço do mundo é controlado por um parâmetro chamado ângulo de giro. O ângulo de giro é animável. É possível ajustá-lo diretamente ou com um manipulador.
O Solucionador de HI permite a criação de várias cadeias ou de cadeias sobrepostas. Isso permite criar várias metas para controles adicionais. Ao vincular os objetos a pontos, splines, ossos ou fictícios, você poderá criar controles simples para animar cadeias ou hierarquias complexas. Também é possível usar restrições com essas metas ou objetos de controle, como outra ferramenta de animação.
Aplicação de um Solucionador de HI
Para aplicar um Solucionador de HI a qualquer parte de uma hierarquia, selecione o osso ou objeto onde deseja que o solucionador comece. Em seguida, escolha o menu Animação  Solucionadores de cinemática inversa Solucionador de HI. No viewport ativo, mova seu cursor até o osso onde deseja que a cadeia termine. Quando você clicar para selecionar o osso, a meta será desenhada no ponto de giro do osso. Se você quiser uma meta no término distante do osso, refine o osso onde deseja que a meta seja posicionada Um osso extra será adicionado e, então, escolher esse osso permitirá que você posicione a meta no término.
Solucionadores de cinemática inversa Solucionador de HI. No viewport ativo, mova seu cursor até o osso onde deseja que a cadeia termine. Quando você clicar para selecionar o osso, a meta será desenhada no ponto de giro do osso. Se você quiser uma meta no término distante do osso, refine o osso onde deseja que a meta seja posicionada Um osso extra será adicionado e, então, escolher esse osso permitirá que você posicione a meta no término.
Quando você cria ossos, um pequeno osso "central" é automaticamente criado no final da cadeia para auxiliar nesse processo.
Configuração de várias correntes
Para manipular um esqueleto para uma perna humana, você poderia usar três cadeias em uma perna, como a seguir:
- A primeira cadeia é criada do quadril até o tornozelo. Essa cadeia controla o movimento geral da perna, incluindo a dobra do joelho.
- A segunda cadeia é criada do tornozelo até a planta do pé. Essa cadeia controla o movimento para cima e para baixo do calcanhar.
- A terceira cadeia é criada da planta do pé até o dedo do pé.
Quando três correntes trabalharem juntas, elas ajudam a manter a posição do pé no espaço. Isso significa que isso manterá o pé plantado no chão enquanto o corpo do personagem se mover. Todas as três cadeias de cinemática inversa nessa configuração quadril-até-dedos-do-pé posiciona metas em posições chave no pé que imitam o comportamento natural do pé. Na vida real, o dedo do pé, a planta do pé e o calcanhar podem estar plantados no chão ou elevados.
Cada cadeia tem uma meta que aciona o movimento do calcanhar, da planta do pé e do dedo do pé. Use as metas de cinemática inversa para elevar o calcanhar, dobrar o dedo do pé, mover e girar o pé inteiro e manter a posição do pé no espaço.
Cadeias sobrepostas
O sistema do solucionador de cinemática inversa permite que você crie cadeias de cinemática inversa sobrepostas em uma única hierarquia. Em uma perna humana, por exemplo, você poderia criar uma cadeia do quadril até o tornozelo, depois uma segunda cadeia do joelho até a planta do pé e uma terceira do tornozelo até os dedos dos pés. Use cadeias sobrepostas quando quiser aplicar metas a ossos sequenciais, mas não quiser refinar os ossos.
Outro bom uso de cadeias de cinemática inversa de HI sobrepostas é manter as metas na parte inferior da hierarquia firmemente enraizadas no lugar. No caso do exemplo da perna, o tornozelo, a planta e o dedo do pé não se moveriam até a parte superior da hierarquia ter atingido seu alongamento total.
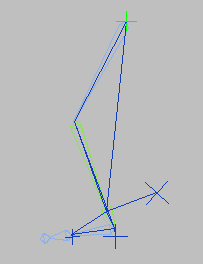
Cadeias sobrepostas fazem com que o dedo fique grudado no chão
Cadeias sobrepostas fazem com que o dedo fique grudado no chão
Não tente sobrepor cadeias com diferentes tipos de solucionadores de cinemática inversa ou você poderá obter resultados imprevisíveis.
Criação de objetos de controle
Para criar objetos de controle para animar as metas, crie fictícios, pontos, splines ou outros objetos próximos à meta e então vincule a meta ao objeto de controle. Por exemplo, em uma perna humana, talvez você tenha uma meta no tornozelo, na planta do pé e no dedo do pé. Em seguida, crie três splines sob o pé, uma para o calcanhar, uma para a planta do pé e outra para o dedo do pé. Vincule cada meta a cada spline para que então seja possível animar as metas usando essas splines. Também seria possível vincular splines juntas, de forma que a rotação do dedo do pé fosse controlada pelo movimento do calcanhar.
Além do vínculo hierárquico, agora você pode usar o novo sistema Restrição em conjunto com solucionadores de cinemática inversa. É possível aplicar qualquer uma das restrições para criar um relacionamento entre as metas ou os ossos e outros objetos. A meta poderia ser posicionar uma restrição em um fictício que é movido. Ou você poderia criar três cadeias de ossos que estivessem todos no mesmo lugar, restringir uma cadeia de ossos a outra e, então, pesar as restrições.
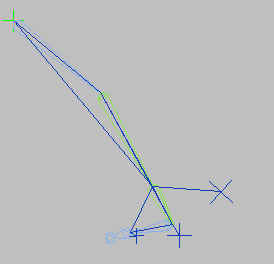
Cadeias de ossos restritas juntas
O uso de objetos de controle oferece a você algo maior para selecionar no viewport. Você também pode usar objetos de controle para separar cadeias, por exemplo, em um braço humano, uma cadeia poderia terminar no pulso e outra cadeia separada ser criada para a mão e para os dedos. O objeto de controle do pulso serve como o nó raiz para a cadeia da mão, ainda que a cadeia permaneça desconectada (hierarquicamente falando) da cadeia do braço.
É possível criar controles deslizantes de viewport usando a ajuda do manipulador e então usar os controles deslizantes do viewport para controlar as transformações dos objetos de controle. Utilize parâmetros de fio para ligar os controles deslizantes aos objetos de controle. Também é possível criar Atributos personalizados para adicionar esses controles deslizantes às implementações de objeto.
Mistura de cinemática direta com cinemática inversa
O solucionador de cinemática inversa de HI oferece uma ferramenta para misturar cinemática direta e cinemática inversa em uma única trilha de animação. Há um subcontrolador de cinemática direta abaixo do controlador de cinemática inversa atribuído por esse solucionador.
Quando o botão Ativado estiver ativado, os valores do subcontrolador de cinemática direta serão preservados, mas ignorados. Quando Ativado estiver desativado, os valores do subcontrolador de cinemática direta serão aplicados. Para acessar o botão Ativado, selecione a meta e vá para o painel Movimento e então desative o botão Ativado. Isso permite animar usando rotações de cinemática direta dos ossos ou de objetos da hierarquia.
Pose de cinemática inversa para FK permite que a cinemática inversa seja ativada na metade da manipulação da cinemática direta. Quando o botão Ativado estiver desativado, e Pose de cinemática inversa para FK estiver ativado, selecionar e mover a meta permitirá que você use a cinemática direta para criar quadros-chave de cinemática direta. Mover a meta posiciona o esqueleto e adiciona chaves de rotação a todos os objetos na cadeia quando o botão Chave automática está ativado.
Ao trabalhar com cinemática inversa e cinemática direta juntas, é possível criar uma situação onde a meta foi movida para além do término da cadeia. Use o botão Snap de cinemática inversa/FK para reposicionar a meta, encaixando-a novamente no término da cadeia. Quando AutoSnap estiver ativado, o encaixe acontecerá automaticamente. Quando você tocar na meta, não terá de clicar no botão Snap de cinemática inversa/FK.
Controle de precisão de cinemática inversa de HI
Quando você estiver animando com Solucionadores de HI, se achar que a animação dos membros não está suave, tente dobrar as Iterações no grupo Soluções da implementação Propriedades do solucionador de HI. Você também pode tentar reduzir o valor de Limites para suavizar a animação.