Você pode usar um membro como um braço, uma perna, asa e assim por diante. Braços e pernas são bastante similares no sentido em que usam o mesmo sistema de cinemática inversa e possuem interfaces de usuário idênticas.
-
Selecione ou adicione um objeto de eixo >
 painel Modificar > lançamento de configuração do eixo > Adicionar perna/braço
painel Modificar > lançamento de configuração do eixo > Adicionar perna/braço
Há duas diferenças entre pernas e braços no CAT:
- Para as pernas são atribuídas FootPlatforms, que incluem o sistema de ponto de giro do pé do CAT.
- Braços e pernas são tratadas de formas diferentes pelo CATMotion.
Um membro pode conter até 20 ossos, cada um dos quais pode incluir até 20 segmentos. Qualquer membro pode ter uma clavícula ou palma, conforme apropriado.
Você pode dispor de ossos de membros em qualquer configuração. A configuração de cinemática inversa envolve simplesmente rotacionar os ossos no modo de Configuração.
Segmentos de ossos rotacionam apenas em torno do centro do próprio osso. Ela permite operações como a torção de antebraços. Você controla as suas rotações relativas com o gráfico Espessura de giro do osso (consulte Editando ossos de membros).
A Palma, que por padrão é inserida automaticamente no extremo do braço, mantém os controles do braço para mesclá-lo entre cinemática inversa e cinemática adiante. Ela também permite a criação de um destino de cinemática inversa para o braço, chave de todas as rotações em um membro e contém os controles principais para os dígitos (dedos).
O CAT suporta a mescla perfeita entre cinemática inversa e cinemática adiante.
Cada palma pode ter até 100 dígitos e cada dígito até 20 ossos. Os dígitos são configurados apenas com os controles de cinemática adiante. Os controles de dígito incluem um importante Gestor da pose do dígito e Modificadores de dígito para manipular os grupos de dígitos.
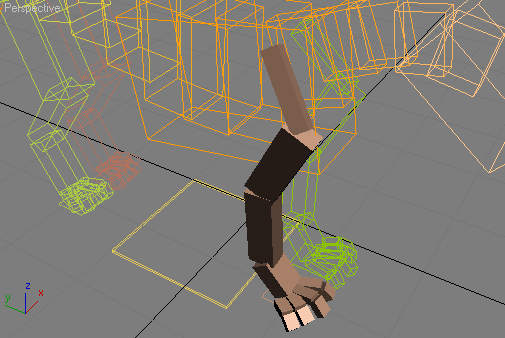
A perna frontal do Panther rig
Procedimento
Para adicionar um membro:
-
 Selecione um centro ao qual anexar o membro.
Selecione um centro ao qual anexar o membro. - Execute um dos seguintes procedimentos, dependendo do tipo de membro a adicionar:
- Para adicionar um braço, faça um dos seguintes:
- No painel Modificar
 Configuração de cubo de desenvolvimento de braço, clique em Adicionar.
Configuração de cubo de desenvolvimento de braço, clique em Adicionar. - No viewport, clique com o botão direito do mouse no centro e no quadrante Ferramentas 2, escolha Adicionar braço.
- No
- Para adicionar um lado, faça um dos seguintes:
- No painel Modificar Configuração de implantação, clique em Adicionar suporte.
- No viewport, clique com o botão direito do mouse no centro, e no quadrante Ferramentas 2, escolha Adicionar perna.
- No
- Para adicionar um braço, faça um dos seguintes: