
-
Selecione um ou mais corpos rígidos MassFX. > Caixa de Diálogo Ferramentas MassFX > (Editor de Multi-Objetos)
Ao usar o painel Editar com uma seleção de corpos rígidos, observe o seguinte:
- Você pode criar novas predefinições de Material Físico somente no painel Editor de Multi-Objetos, não na interface do modificador.
- Editar a propriedade Malhas Físicas com o painel Editor de Multi-Objetos limita-se aos corpos rígidos com uma única forma física. Para editar ou criar objetos com várias malhas, utilize as opçoes do modificador Formatos Físicos.
Interface
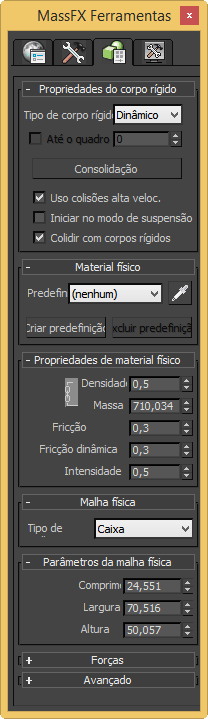
Propriedades de corpo rígido lançamento
Com uma exceção, estes controles estão disponíveis somente quando todos os objetos selecionados são corpos rígidos "sem baking". A exceção é: se a seleção for composta exclusivamente de corpos rígidos que sofreram bake, o botão Desfazer Bake estará disponível para restaurar os objetos para seu status "unbaked" (sem baking).
- Tipo de corpo rígido
- O tipo de simulação para todos os corpos rígidos selecionados. As opções disponíveis são dinâmica, cinemática e estática. Para obter detalhes, consulte Tipos de corpo rígido: dinâmica, cinemática e estática.
- Até que a estrutura
- Quando ativado, MassFX converte os corpos Cinemáticos selecionados para Dinâmicos no quadro especificado. Esta opção só está disponível quando o tipo de corpo rígido está definida para cinemático.
Isso significa que você pode animar um objeto usando métodos padrão e definir o tipo de corpo rígido para cinemático, para executar a animação até o quadro selecionada. Nesse ponto, ela se torna um objeto dinâmico e está sujeito a toda a simulação MassFX forças.
Por exemplo, para recriar um jogo de baseball, você pode animar a bola saindo da mão do arremessador e voando em direção ao bastão. A seguir, usando o quadro limite, quando o bastão atinge a bola, MassFX iria tomar e simular com precisão a ação do rebatedor acertando um home run (ou verificação da substituição).
Dica: Um corpo rígido não precisam ser animados para beneficiar-se desta operação. Por exemplo, você pode desejar suspender vários corpos fixa e, a seguir, solte em períodos diferentes. Para fazer isso, basta definir todas para Cinemática e ativar Até o Quadro, selecionar um de cada vez e especificar o quadro no qual deve iniciar a ser submetido à gravidade. - Consolide / Unbake
- Converte o movimento simulado de corpos rígidos selecionados e sem baking em quadros-chave de animação padrão. Aplica-se somente a corpos rígidos Dinâmicos, e está disponível somente quando todos os corpos rígidos selecionados passaram por baking ou são do tipo sem baking (não uma combinação).
Se todos os corpos rígidos selecionados sofreram baking, o rótulo do botão é "Desfazer Bake", e clicar remove os quadros-chave e restaura os corpos ao status Dinâmico.
- Uso de alta velocidade colisões
- Quando ativado e a opção
 Usar Colisões de Alta Velocidade do painel World está ativada, as configurações Colisões de Alta Velocidade aplicam-se a corpos rígidos selecionados.
Usar Colisões de Alta Velocidade do painel World está ativada, as configurações Colisões de Alta Velocidade aplicam-se a corpos rígidos selecionados. - Iniciar em modo de suspensão
- Quando ativado, os corpos rígidos selecionados iniciam a simulação em modo de espera, usando as configurações de espera globais. Isso significa que eles não irão se mover até que sejam atingidos por um corpo rígido que não esteja em estado de espera. Por exemplo, para simular um efeito dominó , inicie todos os dominós exceto o primeiro em modo de espera.
- Colidir com corpos rígidos
- Quando ativado (o padrão), os corpos rígidos selecionados colidem com outros corpos rígidos na cena.
Desenvolvimento de material físico
Este menu oferece ferramentas básicas para utilizar materiais físicos, que determinam a forma pela qual os corpos rígidos interagem com outros elementos na simulação. Para definir valores específicos, utilize o menu Propriedades de Material Físico (consulte a seguir).
- Predefinição
- Escolha um material predefinido da lista suspensa para alterar todos os valores no menu Propriedades de Material Físico para aqueles salvos na predefinição, e aplique os valores à seleção.
Para utilizar as configurações de um outro corpo rígido na cena, clique em
 e, a seguir, selecione um corpo rígido na cena.
e, a seguir, selecione um corpo rígido na cena. Quando você atribuir pela primeira vez o modificador Corpo Rígido MassFX para um objeto, o MassFX atribui um conjunto padrão de propriedades de material físico, incluindo Densidade = 0.5 e assim por diante, mas não atribui um material físico. Portanto, a predefinição ativa é (Nenhum) e é possível editar as propriedades do material imediatamente. Se você atribuir uma predefinição da lista, suas configurações aparecem no menu Propriedades de Material Físico, mas bloqueados e não disponíveis. Para editar as configurações, clique no botão Bloquear para desbloqueá-los.
- Criar Predefinição
- Cria uma nova predefinição de material físico a partir dos valores atuais. Abre a caixa de diálogo Nome de Material Físico, onde é possível inserir um nome para a nova predefinição. Quando você clica em OK, o novo material torna-se ativo e é adicionado à lista Predefinição.
- Excluir Predefinição
- Remove a predefinição atual da lista e define a lista para (Nenhum). Os valores atuais são mantidos.
Menu Propriedades de Material Físico
As propriedades de Material Físico controlam a maneira pela qual os corpos rígidos interagem com outros elementos na simulação: massa, atrito, recuperabilidade e assim por diante. Após definir as propriedades, é possível salvar como uma predefinição com os controles do menu Material Físico (consulte anterior).
 Bloquear / Desbloquear
Bloquear / Desbloquear- Quando ativado, indicado por um plano de fundo colorido, as configurações de propriedade para a predefinição ativa não estão disponíveis para edição. Para editar os valores, primeiro clique neste botão para desbloquear a configurações.
Quando uma predefinição é atribuída, as configurações estão bloqueadas por padrão. Quando nenhuma predefinição é atribuída, como indicado pela legenda (Nenhum), o botão Bloquear está indisponível e as configurações são sempre editáveis.
Após a edição dos valores de propriedade, utilize Criar Predefinição (consulte anterior) para salvá-los para uma nova predefinição. Caso contrário, os valores editados são perdidos quando você escolhe outra predefinição.
- Densidade
- A densidade do corpo rígido, medido em g / cm3(gramas por centímetro cúbico). Este é um milésimo de medição equivalente em unidades SI: kg/m 3. A alteração deste valor calcula automaticamente a massa para o objeto, com base no seu volume.
- Massa
- A espessura do corpo rígido, medido em kg (quilogramas). A alteração deste valor atualiza automaticamente a densidade do objeto, com base no seu volume.
- Fricção estática
- O grau de dificuldade para dois corpos rígidos para iniciar o deslizamento uns com os outros. Um valor de 0.0 indica que não há atrito (mais derrapante que Teflon); um valor de 1.0 indica atrito completo (cimento de borracha em lixa).
O efeito estático atrito entre dois corpos rígidos é o produto de seus valores de fricção estática. Se um corpo rígido possui fricção estática de 0.0, não importa o que o valor das outras. (Tudo desliza em gelo molhado; até mesmo lixa). Uma vez que os dois objetos iniciar deslizante, a dinâmica de atrito (consulte a seguir) se aplica ao invés disso.
- Dinâmica de atrito
- O grau de dificuldade para dois corpos rígidos para manter o deslizamento uns com os outros. Tecnicamente, este parâmetro é denominado "Coeficiente de atrito cinemático." Um valor de 0.0 indica que não há atrito (mais derrapante que Teflon); um valor de 1.0 indica atrito completo (cimento de borracha em lixa).
Na realidade, este valor deve ser menor que o coeficiente de fricção estática. (É mais difícil de começar a empurrar um sofá pelo chão do que é mantê-lo em movimento.) Como com Static Friction, o valor efetivo entre dois corpos rígidos é o produto de seus respectivos valores.
- Intensidade de repulsão
- Quão facilmente e elevado um objeto é refletido quando atinge um corpo rígido. Tecnicamente, este parâmetro é denominada "coeficiente de restituição." Um valor de 0.0 indica nenhum rebote (uma fração de peanut butter soltos no carpete); um valor de 1. 0 indica que o objeto rebotará desativado apenas sobre como hard como ele só tacada.
A movimentabilidade efetiva entre dois corpos rígidos é a média aritmética de seus valores de movimentabilidade: Adicione seus valores de Recuperabilidade e divida por 2. Portanto, movimentar dois corpos com valores de movimentabilidade de 0.5 cada tem o mesmo resultado que movimentar um corpo com movimentabilidade de 1.0 contra um corpo com movimentabilidade de 0.0.
Dica: Se a movimentação repetida para inesperadamente ou continua por muito tempo, defina Configurações de Movimento para manual e ajuste o valor da Velocidade Mín. Para prolong a movimentação, reduza a Velocidade Mín.; para parar mais cedo, aumente a Velocidade Mín.
Menu Malha Física
Uma malha física de corpo rígido (também conhecido como forma física) é sua representação na simulação. Para obter detalhes, consulte Visão Geral de Corpo Rígido.
- Tipo de Malha
-
O tipo de forma física para corpos rígidos selecionados. Os tipos disponíveis são esfera, caixa, cápsula, Convexo, Côncavo original, e personalizado. Esfera, Caixa e Personalizado são MassFX primitivas e simulam mais rapidamente que as outras. Para melhor desempenho, use o tipo mais simples é possível obter para fora.
Em geral, alterar o tipo de forma gera uma nova forma física do tipo selecionado dimensionada para ajustar-se em torno da malha de gráfico. A exceção é o tipo Côncavo, que deve ser gerado manualmente. As opções disponíveis dependem do tipo de forma ativo e estão disponíveis no menu Propriedades de Malha Física (consulte a seguir).
Nota: Esta configuração não está disponível se qualquer objetoo selecionado usar múltiplas formas físicas e o menu não pode ser usado para criar vários formatos físicos para um corpo rígido. Em tais casos, utilize o modificador menu de Formas Físicas com um único objeto selecionado.
Menu Parâmetros de Malha Física
O conteúdo deste menu varia, dependendo da configuração do Tipo de Malha (consulte anterior). Para obter descrições dos parâmetros para cada tipo, consulte Tipos de forma física do MassFX.
Forças lançamento
Use o Implementação de forças para controlar a gravidade e aplicar a força de deformações de espaço para o corpo rígido.
- Utilize universal gravidade
- Quando desativado, os corpos rígidos utilizam somente forças aplicadas aqui e ignoram a configuração de gravidade global. Quando ativado, os corpos rígidos usam a configuração Gravidade Global.
- Cena forças aplicadas
- Exibe as de flambagens de espaço de Força na cena que afetam os corpos rígidos selecionados na simulação. Utilize Adicionar (consulte a seguir) para aplicar uma flambagem de espaço à seleção. Para evitar que uma flambagem de espaço afete a seleção, selecione-a na lista e clique em Remover.
- Adicionar
- Aplica uma Flambagem de espaço de Força na cena para selecionar corpos rígidos na simulação. Após adicionar o espaço virar para a cena, clique em Adicionar e, a seguir, clique em Espaço de desvio na viewport.
- Remover
- Impede que uma flambagem de espaço afete a seleção. Primeiro, selecione-a na lista, e em seguida clique em Remover.
Menu Configurações Avançadas
Grupo de simulação
- Solucionador de sobreposição de iterações
- Quando ativado, utilize as configurações aqui especificadas para solucionar iterações para corpos rígidos selecionados, em vez da configuração global.
Defina o valor numérico para o número de vezes que o solucionador impõe a conflitos e restrições. Valores maiores podem ser necessários quando a simulação usa várias restrições, ou a tolerância para erros comuns é muito baixa. Um valor maior do que 30 é geralmente desnecessário.
- Ativar Backface Collision
- Disponível somente para os corpos rígidos estáticos. Quando você especificar o tipo de forma original para um côncavo estático corpo rígido, desative esta para garantir que os objetos dinâmicos na simulação colidir com as faces posteriores.
Por exemplo, uma caixa de primitivo, convertê-la em formato de polígono editável, remover um lado e, a seguir, faça uma estática de corpo rígido com o tipo de forma. Se você em seguida, colocar um objeto dinâmico dentro da caixa, ative a opção colisão para a caixa para manter o objeto da queda através dos lados.
Contate o grupo de casca
Use estas configurações para determinar o volume circundante no qual MassFX detectar colisões entre os corpos na simulação.
- Substituir os globais
- Quando ativado, MassFX utiliza as configurações aqui especificadas para sobreposição de colisão para corpos rígidos selecionados, em vez das configurações globais.
- Entre em contato com a distância
- A distância que move os corpos rígidos são permitidos serem sobrepostos.
Um valor de excessivamente alto pode causar que os objetos interpenetram visivelmente. Definir este valor muito baixa pode causar jittering como objetos alternar entre interpenetrating um quadro e sendo obrigatoriamente separados na próxima.
O melhor valor depende de diversos fatores, incluindo o tamanho dos objetos na cena, a proximidade da câmera para possíveis interpenetrations, as configurações para a gravidade aceleração e solucionador iterações inflation, a quantidade dos formatos físicos e a Taxa de quadros da simulação.
- Profundidade do apoio
- A distância em que os corpos de apoio são permitidos para se sobrepõem. Esta configuração pode Reproduzir ao usar Capturar a Transformação para configurar os corpos para suas posições iniciais na simulação. Nota: Alterar o valor da distância de contato altera automaticamente o resto do valor de profundidade para o novo contato de distância mais a diferença entre os dois. Por exemplo, suponhamos que entre em contato com a distância é 10.0 e profundidade de apoio é 8.0 (diferença = – 2.0). Se você alterar a distância de contato para 6.5, a profundidade de apoio altera automaticamente para 4.5 (6.5 + (– 2.0)). No entanto, se você alterar o valor de profundidade de apoio não afeta a distância de contato.
Grupo de movimento inicial
- absoluto ou relativo
- Esta configuração se aplica somente para corpos rígidos iniciados como Cinemáticos (normalmente já são animados) e, a seguir, alternados para Dinâmico no quadro especificado pelos controles Até Quadro no menu Propriedades de Corpo Rígido. Normalmente, a velocidade inicial e inicial girar de corpos são calculadas com base na animação para o último quadro antes que eles se tornem dinâmico. Quando essa opção estiver definida como absoluta, os valores de velocidade inicial e de rotação (veja a seguir) são substituídos por valores baseados em animação. Quando definido como Relativo, os valores especificados são adicionados aos valores calculados a partir da animação.
- Velocidade inicial
- A direção inicial e velocidade (em unidades por segundo) para o corpo rígido quando ele se torna dinâmico. O parâmetros XYZ são mantidos como um vetor normalizado, que pode ser difícil para editar ou como imagem. Para visualizar a velocidade inicial de direção e Opcionalmente altere com a ferramenta Rotacionar, use o velocidade inicial de subobjetos de nível.
- Rotação inicial
- O ponto inicial do eixo e velocidade (em graus por segundo) de corpo rígido de rotação quando ele se torna dinâmico. O parâmetros XYZ são mantidos como um vetor normalizado, que pode ser difícil para editar ou como imagem. Para visualizar o Girar eixo e Opcionalmente altere com a ferramenta Rotacionar, use o inicial Girar subobjetos de nível.
Centro de massa de grupo
O ponto ao redor do qual um corpo rígido gira, a não ser que seja restringido de alguma forma. Para visualizar e ajustar este ponto graficamente para o corpo rígido, use o centro de massa de subobjetos de nível.
Selecione um dos seguintes:
- Calcular a partir de malhas determina automaticamente o centro de massa para o corpo rígido com base em sua geometria.
- Utilize giro utiliza a do objeto Girar como seu centro de massa.
- Local do deslocamento permite definir uma distância desde o objeto de giro do nos eixos X, Y e Z para utilizar como centro de massa.
Grupo de amortecimento
Amortecimento atrasa a corpos rígidos. Os usos típicos incluem reduzindo oscilações em uma simulação ou fazer com que um objeto pareça estar viajando através de um denso médio.
- Linear
- A Quantidade de força aplicada para reduzir a velocidade de objetos em movimento.
- Angular
- A Quantidade de força aplicada para reduzir a velocidade de rotação para rotacionar os objetos.