Para um objeto geométrico participar em uma simulação física,ele deve ter o MassFX modificador de corpo rígido aplicado. (Alternativamente, use o modificador mCloth). A forma mais fácil para converter um objeto em um corpo rígido é selecionar o objeto e em seguida, escolher o tipo apropriado de corpo rígido apropriado do menu desdobrável na barra de ferramentas MassFX.
-
Selecione um ou mais objetos geométricos. >
 Modificar > > painel de lista de modificadores Modificadores de Objeto-Espaço > MassFX RBody
Modificar > > painel de lista de modificadores Modificadores de Objeto-Espaço > MassFX RBody
O modificador de interface consiste em diversos Implementações no painel Modificar mais uma pilha modificadora com quatro níveis de subobjeto. A maioria dos controles nesta Implementação estão disponíveis somente para GUID-62BA863E-A0C4-4CA7-95F1-720F00AE8EA7.htm#GUID-62BA863E-A0C4-4CA7-95F1-720F00AE8EA7__GUID-0759992E-F526-4389-A0A4-CE6A58729501 corpos rígidos despreparados tornar indisponível após o preparamento de movimento de um objeto. Para restaurar os controles, clique no botão despreparado no Implementação de propriedades de corpo rígido.
Interface
Pilha modificadora:níveis de subobjeto
A Pilha modificadora de corpos rígidos fornece o acesso à visualização das configurações que afetam a simulação. Quando um nível de subobjeto está ativo, é possível alterar como a simulação começa e continua ao transformar a respectiva meta-alça.
- Velocidade inicial
- Este nível mostra uma visualização da direção da velocidade inicial para o corpo rígido. use a ferramenta Girar para alterar a direção.
- Rotação inicial
-
Este nível exibe a visualização do eixo e a direção da rotação inicial do corpo rígido. use a ferramenta Girar para alterar o eixo.
- Centro de massa
-
Este nível mostra uma visualização da localização do centro de massa para o corpo rígido. use a ferramenta Mover para alterar a localização.
- Transformação de malha
-
Este nível permite ajustar a posição e a rotação de um forma física para o corpo rígido. destaque a forma física para transformar na lista de lançamentos deformatos físicos ; a forma física irá desenhar em branco o estrutura de arame nas viewports. use as ferramentasMover e Girar para ajustar a forma física de posicionamento relativo em relação ao corpo rígido.
Implementação das propriedades do corpo rígido
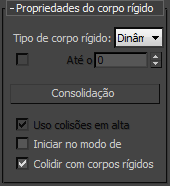
- Tipo de corpo rígido
- O tipo de simulação para todos os corpos rígidos selecionados. As opções disponíveis são dinâmica, cinemática e estática. Para obter detalhes, consulte Tipos de corpo rígido: dinâmica, cinemática e estática.
- Até o quadro
- Quando ativado, MassFX converte o corpo cinemático selecionado para um dinâmico no quadro especificado. Esta opção só está disponível quando o tipo de corpo rígido está definido para cinemático.
Isso significa que você pode animar um objeto usando métodos padrão e definir o tipo de corpo rígido para cinemático, para executar a animação até o quadro selecionada. Nesse ponto, ela se torna um objeto dinâmico e está sujeito a toda a simulação MassFX forças.
Por exemplo, para recriar um jogo de baseball, você pode animar a bola saindo da mão do arremessador e voando em direção ao bastão. A seguir, usando o quadro limite, quando o bastão atinge a bola, MassFX iria tomar e simular com precisão a ação do rebatedor acertando um home run (ou verificação da substituição).
Dica: Um corpo rígido não precisam ser animados para beneficiar-se desta operação. Por exemplo, você pode querer suspender vários corpos estacionários e em seguida, soltá-los em momentos diferentes. Para fazer isso, basta definir todos como cinemáticos e ativar Até o quadro e, em seguida, selecionar cada um deles e especificar o quadro no qual eles devem começar a se sujeitar à gravidade e/ou a outras forças. - Consolidar/Cancelar consolidação
- Converte a simulação de movimento do corpo rígido para quadros-chave padrões de animação para a renderização. Somente se aplica à dinâmica de corpos rígidos.
Se o corpo rígido é renderizado, o botão Etiqueta é "despreparado" e ao clicar remove os quadros-chave e restaura o corpo para um Estado Dinâmico.
- Uso de colisões a alta velocidade
- Quando ligado e o painel
 Uso de colisões em alta velocidade está ligado, as configurações de colisões em alta velocidadesão aplicadas ao corpo rígido.
Uso de colisões em alta velocidade está ligado, as configurações de colisões em alta velocidadesão aplicadas ao corpo rígido. - Iniciar em Modo de Suspensão
- Quando ativado, o corpo rígido inicia a simulação em modo de suspensão, usando as Configurações Globais de Suspensão. Isto significa que ela não se vai mover até ser atingido por um corpo rígido em modo ativo. Por exemplo, para simular um rali de dominó, Inicie todos os dominós exceto o primeiro que está em modo de suspensão.
- Colide com os corpos rígidos
- Quando ativado (o padrão), o corpo rígido colide com os outros corpos rígidos na cena.
Implementação de material físico
As propriedades do material físico controlam a forma como o corpo rígido interage com outros elementos na simulação: sua massa, atrito, intensidade de repulsão, e assim por diante. É possível definir as propriedades do material, uma de cada vez, ou use uma predefinição para simular substâncias reais como as de Papelão ou Borracha.
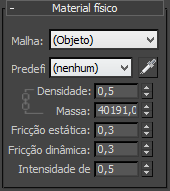
- Malha
- use a lista suspensa para selecionar a forma física do corpo rígido na qual você está alterando os parâmetros de material. Por padrão, todas as formas comuns de material físico usam a configuração denominada "(Objeto)". Somente formatos físicos cujo Material físico é anuladoa caixa de seleção é exibida na lista.
- Predefinido
- Selecione uma predefinição na lista para especificar as propriedades do material físico. (a massa do corpo rígido é recalculado com base no valor de densidade e o volume do objeto). Quando uma predefinição é escolhida, as configurações não são editáveis, mas quando a predefinição é definida como (nenhuma), você pode editar os valores livremente.
Para usar as configurações de um outro corpo rígido na cena, clique em
 e em seguida, selecione um corpo rígido na cena.
e em seguida, selecione um corpo rígido na cena. Na parte inferior da lista são comandos para carregar e salvar uma predefinição como um arquivo e criar uma nova predefinição.
- Densidade
- A densidade do corpo rígido, medido em g / cm3(gramas por centímetro cúbico). Este é um milésimo de medição equivalente em unidades SI: kg/m 3. A alteração deste valor calcula automaticamente a massa para o objeto, com base no seu volume.
- Massa
- A espessura do corpo rígido, medido em kg (quilogramas). A alteração deste valor atualiza automaticamente a densidade do objeto, com base no seu volume.
- Fricção estática
- O grau de dificuldade para dois corpos rígidos para iniciar o deslizamento uns com os outros. Um valor de 0.0 indica que não há atrito (mais derrapante que Teflon); um valor de 1.0 indica atrito completo (cimento de borracha em lixa).
O efeito estático atrito entre dois corpos rígidos é o produto de seus valores de fricção estática. Se um corpo rígido possui fricção estática de 0.0, não importa o que o valor das outras. (Tudo desliza em gelo molhado; até mesmo lixa). Uma vez que os dois objetos iniciar deslizante, a dinâmica de atrito (consulte a seguir) se aplica ao invés disso.
- Dinâmica de atrito
- O grau de dificuldade para dois corpos rígidos para manter o deslizamento uns com os outros. Tecnicamente, este parâmetro é denominado "Coeficiente de atrito cinemático." Um valor de 0.0 indica que não há atrito (mais derrapante que Teflon); um valor de 1.0 indica atrito completo (cimento de borracha em lixa).
Na realidade, este valor deve ser menor que o coeficiente de fricção estática. (É mais difícil de começar a empurrar um sofá pelo chão do que é mantê-lo em movimento.) Como com Static Friction, o valor efetivo entre dois corpos rígidos é o produto de seus respectivos valores.
- Intensidade de repulsão
- Quão facilmente e elevado um objeto é refletido quando atinge um corpo rígido. Tecnicamente, este parâmetro é denominado "coeficiente de restituição." Um valor de 0.0 indica que não há salto (um pedaço de manteiga de amendoim caído no carpete); um valor de 1.0 indica que o objeto vai saltar fora quase tão difícil quanto acertar. A intensidade de repulsão efetiva entre dois corpos rígidos é o produto dos valores da intensidade de repulsão. Uma bola de borracha saltitante pousada em manteiga de amendoin não vai saltar
Implementação de formatos físicos
use esta implementação para editar os formatos físicos atribuídos a um objeto na simulação. Você pode usar os controles para adicionar e remover formatos físicos, altere o tipo de forma, copiar formatos físicos entre objetos, e mais. Quando executar a simulação, MassFX usa todos os formatos físicos atribuídos para representar a presença física do objeto. Para obter mais informações, consulte Visão geral de corpo rígido.
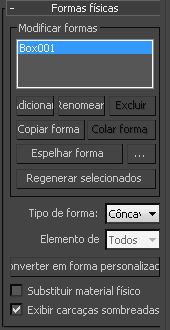
Grupo de Modificação das Formas
- Lista de Formas
- Mostra todas as formas que compõem o corpo rígido. Destaque uma forma física da lista para renomear, excluir, copiar e colar, alterar seus parâmetros de malha ou como afeta a sua transformação usando o Nível de Transformação de subobjetos de malha.
- Adicionar
- Aplica uma nova forma física ao corpo rígido. Por padrão, o novo tipo é a forma Convexa e cobre toda a malha gráfica, o mesmo foi ao aplicar o modificador MassFX de corpo rígido em um objeto. Após você adicionar uma forma, ela é destacada na lista, você pode alterar o tipo de forma, as propriedades e assim por diante.
- Renomear
-
Altere o nome para a forma física destacada. Este nome é apenas para seu próprio uso para identificar facilmente os vários formatos físicos.
- Excluir
- Excluir a forma física destacada do corpo rígido. (a última forma física restante para um corpo rígido não pode ser excluído).
- Copiar forma
- Copie a forma física em destaque para a Área de transferência para subsequente colagem (veja a seguir). A forma física de parâmetros e local de transformação são copiados junto com a malha.
- Colar forma
- Cola uma forma física previamente copiada (veja o anterior) sobre o corpo rígido. Nota: A nova forma física não é um exemplo; todas as alterações feitas à forma física originalmente copiadas não afetam a nova forma física depois de colar.
- Simetria da forma
- Altera a forma da geometria em torno do eixo especificado (consulte a configurações de simetria da forma a seguir).
- Simetria da forma... (configurações)
- Abre uma caixa de diálogo para definir o eixo ao longo da qual a forma é espelhada, e se deseja usar o eixo local ou o eixo mundial.
- Regenera o selecionado
- Adapta a forma destacada na lista para o estado atual da malha de gráficos. use esta opção para redefinir a forma física da malha de gráfico após a edição. Os exemplos podem incluir a transformação de subobjetos ou ajustar a escala do objeto.
- Tipo de forma
- O tipo forma física aplicado ao item destacado na lista modificar formas. Os tipos disponíveis são Esfera, Caixa, Cápsula, Convexo, Côncavo, Original, e Personalizado. Esfera, Caixa, e Personalizadas são MassFX primitivos e simulam mais rapidamente do que outras carcaças. Para melhor desempenho, use o tipo mais simples que você conseguir.
O conteúdo deste lançamento varia, dependendo do tipo de configuração da forma. Para obter descrições dos parâmetros para cada tipo, consulte Tipos de forma física do MassFX.
Alterando o tipo de forma gera um novo formato do tipo dimensionado selecionado para caber em torno da malha de gráficos. As opções para a forma, que dependem do tipo de forma escolhida, estão disponíveis no Implementação físico dos parâmetros de malha (consulte a seguir).
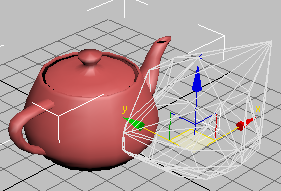
- Elemento da forma
- Os moldes de forma destacados na lista de perfis para o elemento que você escolher a partir da lista de elemento de forma.
Por exemplo, pegue no Bule primitivo e aplique o modificador de corpo rígido com Gerar Forma por elemento por diante. Isso cria quatro elementos físicas por padrão, cujo o primeiro é o corpo do Bule: Elemento 1. Se, com um elemento em destaque na lista Formas, você escolher o Elemento 2 (cabo) da lista de Formas de Elemento, MassFX remodela a forma física do corpo do bule na alça. Se você selecionar todos os elementos, o Elemento 1 assume a forma e o tamanho da malha do Bule. Se você alterar a configuração do Tipo de forma, digamos Convexo para a caixa, o resultado é uma forma física desse tipo que encaixa em torno da forma ativa item de Elemento.
- Converter para uma forma personalizada
- Ao clicar neste botão, cria um novo objeto de malha editável na cena da forma física em destaque e define o tipo de formato para personalizado. Você pode usar as ferramentas de edição das malhas padrão para ajustar a malha e em seguida, atualizar a forma física dela. Para obter mais informações, consulte Personalização.
- Substituição do Material Físico
- Por padrão, cada forma física em um corpo rígido usa as configurações de material definidos em Implementação do Material Físico. No entanto, você pode estar trabalhando com um complexo de corpo rígido complexo que compreende diversos formatos físicos, sempre que você deseja usar configurações diferentes para determinadas formatos físicos. Neste caso, ativar a Implementação do Material Físico. Todas as propriedades nesta seção de trabalhos são descritas para o Implementação do Material Físico, mas somente se aplicam à malha física selecionada.
- Exibição sombreada de carcaças
- Quando ativado, renderiza as formas físicas como sombreados, objetos sólidos em viewports sombreados, em vez de como quadros de arame. Também ativa a propriedade de exibição transparente para o gráfico da malha para tornar mais fácil ver os formatos físicos.
Parâmetros de malha física
O conteúdo deste Implementação varia, dependendo das definições do tipo de forma. Para obter descrições dos parâmetros para cada tipo, consulte Tipos de forma física do MassFX.
Forças lançamento
Use o Implementação de forças para controlar a gravidade e aplicar a força de deformações de espaço para o corpo rígido.
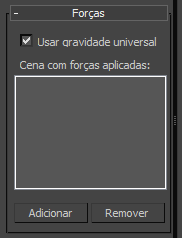
- use a gravidade universal
- Quando desativado, o corpo rígido usa somente aqui as forças aplicadas e ignora a configuração global de gravidade. Quando ativado, o corpo rígido usa a configuração global de gravidade.
- Forças da cena aplicadas
- Lista Flambagens de espaço da força na cena que afetam este objeto na simulação. Utilize Adicionar para aplicar uma flambagem de espaço ao objeto. Para evitar que uma flambagem de espaço afete o objeto, selecione-a da lista e, em seguida, clique em Remover.
- Adicionar
- Aplica uma Flambagem de espaço da força na cena para o objeto na simulação. Após adicionar a flambagem do espaço à cena, clique em Adicionar e, em seguida, clique na flambagem de espaço no viewport.
- Remover
- Impede que uma flambagem de espaço afete o objeto. Primeiro, selecione-a na lista e, em seguida, clique em Remover.
Implementação Avançado
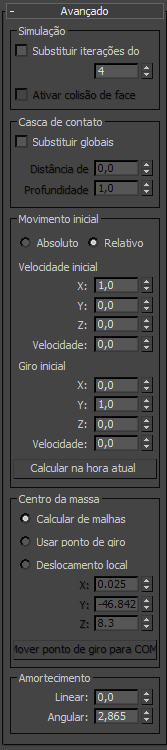
Grupo de simulação
- Solucionador de sobreposição de iterações
- Quando ativado, MassFX usa a configuração especificada aqui para interações do solucionador para este corpo rígido em vez da Configuração global.
Defina o valor numérico para o número de vezes que o solucionador impõe a conflitos e restrições. Valores maiores podem ser necessários quando a simulação usa várias restrições, ou a tolerância para erros comuns é muito baixa. Um valor maior do que 30 é geralmente desnecessário.
- Ativar Backface Collision
- Disponível somente para os corpos rígidos estáticos. Quando você especificar o tipo de forma original para um côncavo estático corpo rígido, desative esta para garantir que os objetos dinâmicos na simulação colidir com as faces posteriores.
Por exemplo, uma caixa de primitivo, convertê-la em formato de polígono editável, remover um lado e, a seguir, faça uma estática de corpo rígido com o tipo de forma. Se você em seguida, colocar um objeto dinâmico dentro da caixa, ative a opção colisão para a caixa para manter o objeto da queda através dos lados.
Contate o grupo de casca
Use estas configurações para determinar o volume circundante no qual MassFX detectar colisões entre os corpos na simulação.
- Substituição global
- Quando ativado, MassFX usa as configurações especificadas aqui para colisão sobreposição para o corpo rígido em vez da configurações globais.
- Distância de Contato
- A distância que move os corpos rígidos são permitidos serem sobrepostos.
Um valor de excessivamente alto pode causar que os objetos interpenetram visivelmente. Definir este valor muito baixa pode causar jittering como objetos alternar entre interpenetrating um quadro e sendo obrigatoriamente separados na próxima.
O melhor valor depende de diversos fatores, incluindo o tamanho dos objetos na cena, a proximidade da câmera para possíveis interpenetrations, as configurações para a gravidade aceleração e solucionador iterações inflation, a quantidade dos formatos físicos e a Taxa de quadros da simulação.
- Profundidade do apoio
- A distância em que os corpos de apoio são permitidos para se sobrepõem. Esta configuração pode Reproduzir ao usar Capturar a Transformação para configurar os corpos para suas posições iniciais na simulação. Nota: Alterar o valor da distância de contato altera automaticamente o resto do valor de profundidade para o novo contato de distância mais a diferença entre os dois. Por exemplo, suponhamos que entre em contato com a distância é 10.0 e profundidade de apoio é 8.0 (diferença = – 2.0). Se você alterar a distância de contato para 6.5, a profundidade de apoio altera automaticamente para 4.5 (6.5 + (– 2.0)). No entanto, se você alterar o valor de profundidade de apoio não afeta a distância de contato.
Grupo de movimento inicial
- absoluto ou relativo
- Esta configuração se aplica somente aos corpos rígidos que comecem cinemáticos (normalmente estes já são animados) e em seguida, alterne para Dinâmico no quadro especificado usando a configuração do quadro limite pelo quadro de ajuste da implementação das propriedades do corpo rígido. Normalmente, a velocidade inicial e a rotação dos corpos são calculados com base na animação para o último quadro antes que eles se tornem dinâmicos. Quando essa opção estiver definida como absoluta, os valores de velocidade inicial e de rotação (veja a seguir) são substituídos por valores baseados em animação. Quando definido como Relativo, os valores especificados são adicionados aos valores calculados a partir da animação.
- Velocidade inicial
- A direção inicial e velocidade (em unidades por segundo) para o corpo rígido quando ele se torna dinâmico. O parâmetros XYZ são mantidos como um vetor normalizado, que pode ser difícil para editar ou como imagem. Para visualizar a velocidade inicial de direção e Opcionalmente altere com a ferramenta Rotacionar, use o velocidade inicial de subobjetos de nível.
- Rotação inicial
- O ponto inicial do eixo e velocidade (em graus por segundo) de corpo rígido de rotação quando ele se torna dinâmico. O parâmetros XYZ são mantidos como um vetor normalizado, que pode ser difícil para editar ou como imagem. Para visualizar a rotação do eixo e opcionalmente alterar com a ferramenta de rotação, use o rotação inicial de subobjetos de nível.
- Calcular a hora atual
- É aplicado à animação, cinemática de corpos rígidos. Determina os valores de movimento (ver anterior) para o objeto animado do quadro atual e, em seguida, define a velocidade e rotação inicial dos campos iniciais para esses valores.
use esta função para aplicar o movimento inicial de um ponto na animação do corpo cinemático que não seja no quadro no qual ele é dinâmico.
Centro de massa de grupo
O ponto ao redor do qual um corpo rígido gira, a não ser que seja restringido de alguma forma. Para visualizar e ajustar este ponto graficamente para o corpo rígido, use o centro de massa de subobjetos de nível.
Selecione um dos seguintes:
- Calcular a partir de malhas determina automaticamente o centro de massa para o corpo rígido com base em sua geometria.
- Utilize giro utiliza a do objeto Girar como seu centro de massa.
- Local do deslocamento permite definir uma distância desde o objeto de rotação nos eixos X, Y e Z para usar como centro da massa.
- Mover ponto de pivô para COM Realoca a rotação do objeto no centro da massa no local especificado pelo deslocamento dos valores XYZ. Disponível apenas quando a compensação local está ativa.
Grupo de amortecimento
Amortecimento atrasa a corpos rígidos. Os usos típicos incluem reduzindo oscilações em uma simulação ou fazer com que um objeto pareça estar viajando através de um denso médio.
- Linear
- A Quantidade de força aplicada para reduzir a velocidade de objetos em movimento.
- Angular
- A Quantidade de força aplicada para reduzir a velocidade de rotação para girar os objetos.
Implementação de nós relativos
- Selecione "ragdoll"
- Seleciona " ragdoll "ao qual o corpo rígido pertence. Esta opção só está disponível quando o corpo rígido é parte de um objeto do tipo "ragdoll".