Tutorial: Shape optimization analysis
This tutorial shows you how to perform a Shape Optimization study on a robot gripper arm, to reduce its weight and save material costs. The gripper arm, made of steel, is designed to withstand compressive loads on the gripping surface. It is important that the new design complies with the original design specifications, and maintains a Safety Factor of at least 2.0 for the applied load.
In this tutorial, you
Create a Shape Optimization study to optimize the shape of a robot gripper arm and reduce the material by 40%
Apply constraints and loads to preserve vital aspects of the original design
Define the shape optimization criteria and run the shape optimization analysis
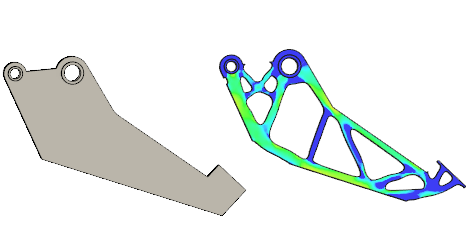
Modify the original design in the Design workspace, based on the shape optimization mesh object
Run a static stress analysis to check that the new design meets the design specifications.