| Accesso |
Nella finestra di dialogo Inserisci giunto, fare clic sull'icona Visualizza tabella giunti. |
Fare clic sulle immagini nella sezione superiore della finestra di dialogo per passare da una categoria di giunti all'altra.
Giunti standard
I giunti standard sono quelli utilizzati più comunemente. Questi giunti sono basati su diverse combinazioni di gradi di libertà di rotazione e conversione. I giunti disponibili in questa categoria sono:
![]() Rivoluzione
Rivoluzione
![]() Prismatico
Prismatico
![]() Cilindrico
Cilindrico
![]() Sferico
Sferico
![]() Piano
Piano
![]() Punto-Linea
Punto-Linea
![]() Linea-Piano
Linea-Piano
![]() Punto-Piano
Punto-Piano
![]() Spaziale
Spaziale
![]() Saldatura
Saldatura
Giunti di rotolamento
Anche se le immagini indicano che i giunti possono essere utilizzati per simulare i meccanismi dell'ingranaggio, non è prevista la mesh reale dei denti dell'ingranaggio. Il metodo stabilisce un rapporto basato sulla geometria selezionata per il raggio di rotazione effettivo degli ingranaggi.
![]() Rotolamento: cilindro sul piano
Rotolamento: cilindro sul piano
![]() Rotolamento: cilindro sul cilindro
Rotolamento: cilindro sul cilindro
![]() Rotolamento: cilindro nel cilindro
Rotolamento: cilindro nel cilindro
![]() Rotolamento: cilindro curva
Rotolamento: cilindro curva
![]() Cinghia
Cinghia
![]() Rotolamento: cono sul piano
Rotolamento: cono sul piano
![]() Rotolamento: cono sul cono
Rotolamento: cono sul cono
![]() Rotolamento: cono nel cono
Rotolamento: cono nel cono
![]() Vite
Vite
![]() Ingranaggio a vite
Ingranaggio a vite
Giunti di scorrimento
![]() Scorrimento: cilindro sul piano
Scorrimento: cilindro sul piano
![]() Scorrimento: cilindro sul cilindro
Scorrimento: cilindro sul cilindro
![]() Scorrimento: cilindro nel cilindro
Scorrimento: cilindro nel cilindro
![]() Scorrimento: cilindro curva
Scorrimento: cilindro curva
![]() Scorrimento: punto curva
Scorrimento: punto curva
Giunto a contatto
Il giunto a contatto 2D è preciso. Rileva il momento in cui si verifica una collisione, ma consente anche di effettuare separazioni. Poiché le superfici non includono sfaccettature e non vengono penetrate, è meno probabile che si verifichino anomalie nei risultati. Quando si lavora con meccanismi come camme e cedenti, utilizzare giunti di questo tipo anziché a contatto 3D, per esaminare accuratamente il funzionamento del meccanismo. In alcuni casi, è necessario creare della geometria aggiuntiva su una parte o utilizzare più giunti 2D per ottenere risultati appropriati.
![]() Contatto 2D
Contatto 2D
Modifica della geometria per ottenere una linea chiusa arrotondata continua.
Al fine di ottenere una linea chiusa continua arrotondata per l'algoritmo del contatto 2D (per migliorare il calcolo), viene apportata una leggera modifica alla geometria. Tutta la discontinuità nel profilo viene arrotondata in modo da ottenere una linea chiusa continua che consenta al software di risolvere rapidamente il contatto. Nell'esempio seguente viene illustrato cosa si verifica nel software.
 |
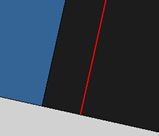
Nell'esempio è indicato un blocco, con facce piane, a contatto con un altro componente in cui non tutte le facce sono parallele con le facce del blocco. Da lontano, i vettori del contatto (rossi) sembrano disposti come previsto. |
 |
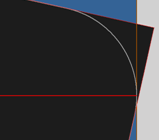
Se si ingrandisce l'area del contatto delle facce non parallele, si può verificare che nel contatto esiste una leggera sovrapposizione. |
 |
Se si ingrandisce l'area del contatto della faccia parallela, si può verificare ciò che viene visualizzato a sinistra. |
 |
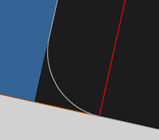
Questa condizione si verifica perché tramite Simulazione dinamica vengono automaticamente creati raccordi o angoli levigati, come indicato nell'immagine a sinistra. Come si può notare, il contatto risulta esatto rispetto al raccordo. |
 |
Anche per quanto riguarda il giunto delle facce parallele, il contatto risulta esatto rispetto al raccordo. |
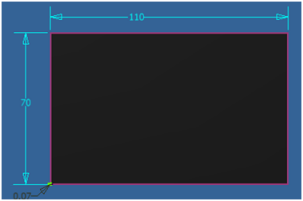 |
Il raccordo viene creato dal software mediante l'utilizzo del metodo seguente:
Se viene raggiunto il valore minimo di 5e-6 mm, il vertice non viene arrotondato. Nell'esempio a sinistra, Lmin = 70 mm e l'angolo è perpendicolare (90 gradi), pertanto il raggio è uguale a 0,07 mm. |
Giunti di forza
![]() Contatto 3D
Contatto 3D
![]() Molla/Smorzatore/Cilindro
Molla/Smorzatore/Cilindro
| Tipo | Parametri | Visualizza | Commenti |
|---|---|---|---|
| Molla a spirale | Rigidità, Lunghezza libera, Smorzamento | Molla a spirale | Tipo di default. La forza dipende dalla distanza tra i 2 punti (rigidità e lunghezza libera) e dalla velocità tra l'uno e l'altro (smorzamento). |
| Molla | Rigidità, Lunghezza libera, Smorzamento | Cilindri impilati, separati | Stessa azione della molla a spirale. Il risultato in qualche modo rassomiglia alla rondella Belleville e vengono ottimizzati i tempi di visualizzazione. |
| Smorzatore a molla | Rigidità, Lunghezza libera, Smorzamento | Molla a spirale e smorzatore | Stessa azione della molla a spirale. Il risultato è simile ad un assorbitore di shock di un'automobile. |
| Smorzatore | Smorzamento | Smorzatore | Solo azione di smorzamento. La forza dipende dalla velocità tra i 2 punti. |
| Cilindro | Input grafico o Costante | Smorzatore | Il parametro Forza viene applicato direttamente al modello. Nel grafico viene illustrato un meccanismo di tipo cilindrico. |