Der erste Schritt bei der Anpassung einer horizontalen Vermessung besteht in der Berechnung von C, der Koordinatenmatrix, mit den ungefähren Koordinaten aller Stationen.
Als Nächstes wird die L-Matrix basierend auf den berechneten Beobachtungen aus der Koordinatenmatrix C und den gemessenen Beobachtungen errechnet. Zur Bestimmung der einzelnen Li-Beobachtungswerte wird folgende Formel verwendet:
Dabei gilt:
- Omeas = gemessene Beobachtung
- Ocalc = berechnete Beobachtung
Die L-Matrix wird wie folgt dargestellt:
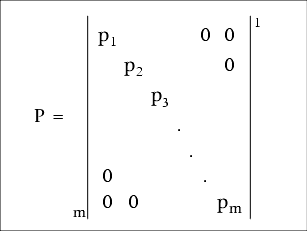
Als Nächstes wird die Matrix P mit der diagonalen Gewichtung auf Basis der Standardabweichungen von Entfernungen und Winkeln berechnet. Die folgenden Formeln werden verwendet, um ![]() , den gewichteten Entfernungswert, und
, den gewichteten Entfernungswert, und ![]() , den gewichteten Winkelwert, zu ermitteln:
, den gewichteten Winkelwert, zu ermitteln:
Dabei gilt:
![]() ist die Standardabweichung der Länge ij.
ist die Standardabweichung der Länge ij.
Dabei gilt:
![]() ist die Standardabweichung des Winkels jik.
ist die Standardabweichung des Winkels jik.
Der letzte Schritt besteht darin, die Matrix A zu berechnen. Diese Matrix setzt die Koordinatenänderungen in Bezug zu den einzelnen Beobachtungen, die durch die Anwendung der Gleichungen für die Entfernungs- und Winkel-Beobachtungen oder der Gleichungen für die Azimut-/Quadrantenwinkel-Beobachtung bestimmt wurden. Diese Gleichungen sind zunächst nicht linear. Es wird also die Taylor-Approximation verwendet, um sie als lineare Gleichungen wiederzugeben.