![]()
Biped の動作が自然になるように、特定の Biped の肘や膝などの関節の回転は制限されています。関節が、X、Y、Z の 3 つのすべての軸に対して回転できる場合、3 つの自由度(DOF)があるといえます。関節の自由度は、関節を選択し、[階層](Hierarchy)パネルの[ロック](Locks)ロールアウトのオプションを設定して修正することができます。
次の表に、各関節の自由度を示します。Biped では、大半の人間にとって可能な自由度よりも大きな自由度を使用できます。回転はすべて、ローカル座標系で実行されます。
3 次元のすべてで Biped の骨盤を回転するには、「球体関節としての骨盤」を参照してください。
Biped モーション コンストレイント
この後の表および項で説明するように、パーツによっては、固有の条件を持つものがあるので、変換するときには、その条件に従ってください。
| Biped のリンク | リンク名 | 自由軸 | コメント |
|---|---|---|---|
| 重心 | Bip001 (既定値) | X、Y、Z | Biped 全体が回転する |
| 骨盤 | Pelvis | X、Y、Z | 足が接地している場合は、脚を調整して足と足の指を地面から持ち上げた状態にする |
| 頭 | Head | X、Y、Z | |
| 首 | Neck | X、Y、Z | 首の方向は頭の方向には影響を及ぼさない |
| 脊椎 | Spine、Spine1-4 | X、Y、Z | 全体的なバランスは脊椎の回転で調整する |
| 尾 | Tail、Tail1-4 | X、Y、Z | |
| 鎖骨 | R Arm、L Arm | Y、Z | 肩の方向は鎖骨の方向には影響を及ぼさない |
| 肩(上腕) | R UpperArm、L UpperArm | X、Y、Z | 車軸関節を肩から手首まで回転させる |
| 肘(前腕) | R Forearm、L Forearm | X、Z | 蝶番関節 + 特殊な回転 |
| 尻(上脚) | R Thigh、L Thigh | X、Y、Z | 車軸関節を尻から足首まで回転させる |
| 膝(下脚) | R Calf、L Calf | X、Z | 蝶番関節 + 特殊な回転 |
| 手 | R Hand、L Hand | X、Y、Z | |
| 足 | R Foot、L Foot | X、Y、Z | 足が接地している場合は、脚を調整して足と足の指を地面から持ち上げた状態にする |
| 指 | Finger0、01、02、Finger1、11、12 など | X、Y、Z | 指の基点は 3 つの自由軸を持つ。指の他の関節は Z 軸の自由度しか持たない |
| 足の指 | Toe0、01、02、Toe1、11、12 など | X、Y、Z | 足の指の基点は 3 つの自由軸を持つ。指の他の関節は Z 軸の自由度しか持たない |
球体関節としての骨盤
骨盤は X、Y、Z の 3 つすべての軸で回転させることができます。この球体関節には、Biped を使用して行うアニメートの柔軟性を改善する 3 つの自由度があります。それは、骨盤の旋回は、重心の回転と連結していないためです。この機能により、重心はより滑らかな軌道を仮定しますし、Biped の頭や腕にも影響します。結果として、各パーツは Biped の重心回転スペース内でより自然な動きをします。
そこで、以下の動作の変化に注意してください。
- 3 自由度(3 DOF)の骨盤のモーションが、3 本の異なったオイラー/クォータニオン(TCB)ファンクション カーブとして、カーブ エディタとワークベンチに表示されます。
- Biped の脊椎でキー削減を実行すると、よりよい結果が得られます。
- 新しい骨盤軸(X 軸と Z 軸)を中心とした回転は、レイヤ内でキー可能であり、MAXScript でサポートされます。
- 既定値のパラメトリックな足跡アニメーションは、3 自由度の骨盤を使用できるように若干調整されます。
- 3ds Max Biped に、BIP ファイルのような従来の Biped アセットをロードした場合、骨盤関連のデータは、新しい DOF と、骨盤が回転する新しい座標空間に適合するように変更されます。
- モーション Mixer やモーション フローにより、骨盤回転トラックを含む新しいアセットと、これらのトラックを含まない古いアセットがブレンドされます。
特殊な回転: 肘と膝
肘と膝をそれぞれの X 軸を中心に回転させると、肘と膝は特殊な回転を行います。肘と膝は、実際には X 軸を中心として回転するわけではありません。ただし、これでは、肘と膝は 1 つの自由度しか持たないことになります。代わりに、上腕と前腕(または上脚と下脚)が同時に、肩から手首、尻から足首まで伸ばした直線によって定義される目に見えない軸を中心に回転します。この特殊な回転は、腕や脚を動かすのに非常に役立ちます。
この特殊な回転は、逆方向に曲がった膝を持つキャラクタを作成する場合にも役立ちます。正面を向いた人間の膝の姿勢を 90 度を超えて後ろ方向に回転させると、そのキャラクタは後ろ向きの膝または鳥の脚を持つものとみなされ、これがすべての .bip モーションの基準の位置として使用されます。

前腕を X 軸を中心に回転させると、腕要素は肩と手首を結ぶ目に見えない軸を中心に回転します。
バランス: Spine (脊椎)
Biped では、Biped のバランスを維持するのに、脊椎と重心のみを使用します。このため、脊椎全体か、そのリンクのいずれかを回転させると、ボディの水平方向の位置が重心に応じて変わります。これらの調整は重心のローカル参照座標系で実行されるため、フィギュアはその重心を中心に自然に回転します(たとえば、宙返りしているときなど)。
この機能をオフにするには、[モーション](Motion)パネルの[キー情報](Key Info)ロールアウト上で、水平方向の重心キーに対応する[バランス係数](Balance Factor)を 0.0 に設定します。[バランス係数](Balance Factor)コントロールは、ロールアウトの[ボディ](Body)領域にあります。
独立した方向: 腕、頭、足
鎖骨(ルートの腕オブジェクト)の方向を変えると、対応する上腕の位置が変わりますが、その方向は変わりません。鎖骨は、腕をつり下げる支えにすぎません。
同様に、首の方向を変えると、頭の位置が変わりますが、その方向は変わりません。頭は首にリンクされていますが、頭は一般的には首とは別々に回転します。これらの独立して設定された方向が補間されることで、より自然な感じのモーションが生成されます。
頭や腕の場合と同じように、上脚や下脚の方向を変えると、対応する足の位置が変わりますが、その方向は変わりません。このため、足の方向は常に地面に対するものになります。
TCB 回転によるキーの調整
Biped の四肢のモーションを微調整する場合は、余分なキーを作成する代わりに、すでに存在するキーに対して TCB の各コントロールを使用することで、イーズイン、イーズアウト、および四肢の軌道を調整できます。
ファンクション カーブを使用した回転アニメーションの視覚化
カーブ エディタを使って、回転アニメーションを視覚化する方法もあります。追加されたキーが画面に表示され、別のキーに接続されることにより、アニメーションのカーブが作成されていきます。TCB 回転コントローラかオイラー XYZ コントローラ([クォータニオン/オイラー](Quaternion/Euler)ロールアウト) を使って、回転のカーブをクォータニオンまたはオイラーとして表示することができます。コントローラによって回転の計算方法が違うので、カーブに与える影響が異なります。詳細は、Biped アニメーションのオイラー カーブの操作を参照してください。
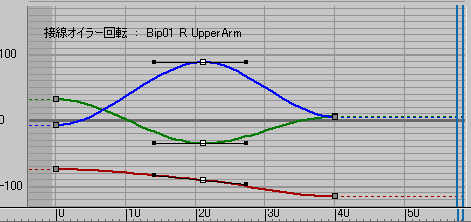
接線オイラー回転カーブ
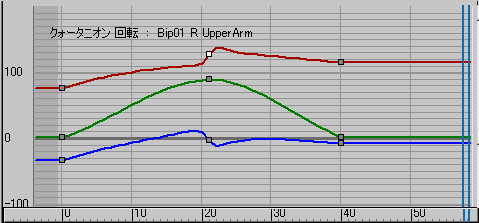
クォータニオン回転カーブ
手順
Biped の腕の TCB を変更するには:
- [キー情報](Key Info)ロールアウトで
 ([軌道](Trajectories))をオンにします。
([軌道](Trajectories))をオンにします。 - Biped の腕を
 選択します。
選択します。  ([次のキー](Next Key))または
([次のキー](Next Key))または  ([前のキー](Previous Key))を使用して、腕のキーを見つけます。
([前のキー](Previous Key))を使用して、腕のキーを見つけます。 - [TCB]領域が表示されていない場合は、TCB ディバイダをクリックします。
- [テンション](Tension)、[連続性](Continuity)、および[バイアス](Bias)の各編集ボックスを変更します。
新しいパラメータを反映して軌道が変化します。アニメーションを再生し、変更内容を表示します。
ヒント: トラックバー、トラック ビューのカーブ エディタ、ワークベンチのカーブ ビューに表示されているキーを右クリックしても、[TCB]コントロールを表示できます。