Изменение координат для каждого наблюдения выражается следующей аппроксимацией рядом Тейлора уравнения погрешностей углов:
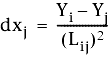

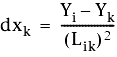
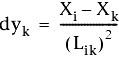
где
- Lij = полученная в результате съемки длина линии IJ
- Lik = полученная в результате съемки длина линии IK
- Lik = полученная в результате съемки длина линии IK
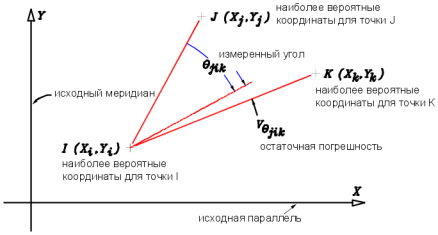
- Xi, Yi = наиболее вероятные координаты точки I
- Xj, Yj = наиболее вероятные координаты точки J
- Xk, Yk = наиболее вероятные координаты точки K
На следующем рисунке показана геометрия уравнения погрешностей углов: