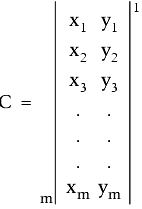
Первым этапом в корректировке съемки по горизонтали является расчет матрицы координат С с приблизительными значениями координат для всех пикетов.
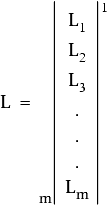
Затем на основании рассчитанных значений, полученных из матрицы координат С и результатов наблюдений, рассчитывается матрица L. Для определения значения каждого наблюдения Li используется следующая формула:
где:
- Omeas = результат наблюдения
- Ocalc = рассчитанный результат наблюдения
Матрица L выглядит следующим образом:
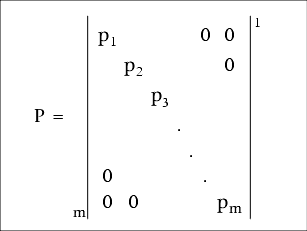
Далее на основании среднеквадратических отклонений расстояний и углов вычисляется диагональная матрица весов. Для решения ![]() , значения взвешенного расстояния, и
, значения взвешенного расстояния, и ![]() , значения взвешенного угла, используются следующие формулы:
, значения взвешенного угла, используются следующие формулы:
где:
![]() - среднеквадратическое отклонение длины ij и
- среднеквадратическое отклонение длины ij и
где:
![]() - среднеквадратическое отклонение угла jik
- среднеквадратическое отклонение угла jik
В заключение вычисляется матрица А, которая связывает изменения координат с данными съемки, определенными с помощью уравнений погрешностей расстояний и углов азимутов или румбов. Эти уравнения являются нелинейными, поэтому для приведения их к линейному виду используется аппроксимация ряда Тейлора.