You can include static components in the .mtd file, such as a tool holder, so it is collision checked.
When you include a static component in collision checking, PowerMill recognises the component does not have a movement axis and only collision checks it against axis components (the moving components of a machine tool, including the rotary table) and not other static components.
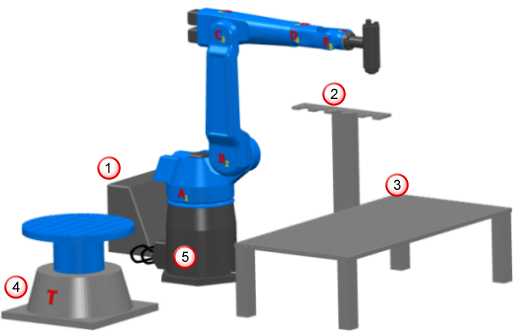
This example shows you how to add the following components so they are collision checked:
- Robot control

- Tool holder

- Table

- Base of the rotary table

- Base of the robot

You need to specify a NAME attribute for each of the static components, as PowerMill collision checks components with a NAME attribute.
- Open the
Robot_cell.mtd file in an XML editor. This example uses
NotePad++.
Within the .mtd file, each static component is defined in its own section (referred to as parent elements in XML). Each static component is identified by a comment, for example: <!-- The controller is static -->, followed by the child element <machine_part>.
- Edit the <machine_part> element associated with the controller by entering the attribute NAME="RobotCellController", so the element reads: <machine_part NAME="RobotCellController">.
- Edit the <machine_part> element associated with the tool holder by entering the attribute NAME="RobotCellTool", so the element reads: <machine_part NAME="RobotCellTool">.
- Edit the <machine_part> element associated with the table by entering the attribute NAME="RobotCellTable", so the element reads: <machine_part NAME="RobotCellTable">.
- Edit the <machine_part> element associated with the base of the rotary table by entering the attribute NAME="RotaryTableBase", so the element reads: <machine_part NAME="RotaryTableBase">.
- Edit the <machine_part> element associated with the base of the robot by entering the attribute NAME="RobotBase", so the element reads: <machine_part NAME="RobotBase">.
- Save the .mtd file.
Each static component is now collision checked.