アセンブリ関係
Fusion の [デザイン] 作業スペースでは、アセンブリ内のコンポーネント間にさまざまなタイプの関係を作成して、それらの相対的な位置、自由度、およびモーションを定義することができます。
コンポーネント間の関係を作成および修正するには、 [デザイン] > [アセンブリ] パネルの次のツールを使用します。
- コンポーネントを拘束
 : ジオメトリを拘束して、2 つ以上のコンポーネントを相対的に配置し、アセンブリ内の自由度を減らして、関係するコンポーネント間に拘束関係を作成します。
: ジオメトリを拘束して、2 つ以上のコンポーネントを相対的に配置し、アセンブリ内の自由度を減らして、関係するコンポーネント間に拘束関係を作成します。 - [ジョイント]
 : 互いに対してまだ相対的に配置されていないコンポーネント間にジョイントを作成します。
: 互いに対してまだ相対的に配置されていないコンポーネント間にジョイントを作成します。 - [位置固定ジョイント]
 : 互いに対して既に相対的に配置されているコンポーネント間にジョイントを作成します。
: 互いに対して既に相対的に配置されているコンポーネント間にジョイントを作成します。 - [ジョイントの原点]
 : 後でアセンブリ関係を定義するときに使用できる座標系をコンポーネントに作成して配置します。
: 後でアセンブリ関係を定義するときに使用できる座標系をコンポーネントに作成して配置します。 - [剛性グループ]
 : コンポーネントを一緒にロックして、アセンブリ内で一緒に移動するようにします。
: コンポーネントを一緒にロックして、アセンブリ内で一緒に移動するようにします。 - [接線関係]
 : あるコンポーネントの面と、アセンブリ内の別のコンポーネントで接する面のセットとの間に、接線関係を作成します。
: あるコンポーネントの面と、アセンブリ内の別のコンポーネントで接する面のセットとの間に、接線関係を作成します。 - [ジョイントを駆動]
 : 回転角度や距離などのジョイントのモーション入力を修正し、自由度をコントロールします。
: 回転角度や距離などのジョイントのモーション入力を修正し、自由度をコントロールします。 - [モーション リンク]
 : 2 つのジョイントのモーションをリンクします。
: 2 つのジョイントのモーションをリンクします。
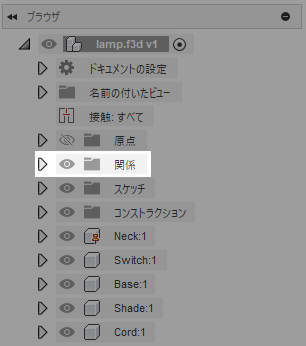
コンポーネント間に新しい関係を作成すると、その関係が [ブラウザ] > [関係] フォルダに表示されます。
アセンブリ拘束
拘束は、2 つ以上のコンポーネントを相互に相対的な位置に配置するようにジオメトリを拘束するアセンブリ関係です。
拘束を使用して、可動自由度(DOF)をロックし、コンポーネント間の関係の複雑さを軽減します。複数の拘束を同時に作成して、セットとして定義することもできます。
拘束のアクセス ポイント
アセンブリ拘束を操作できるアクセス ポイントは 2 つあります。
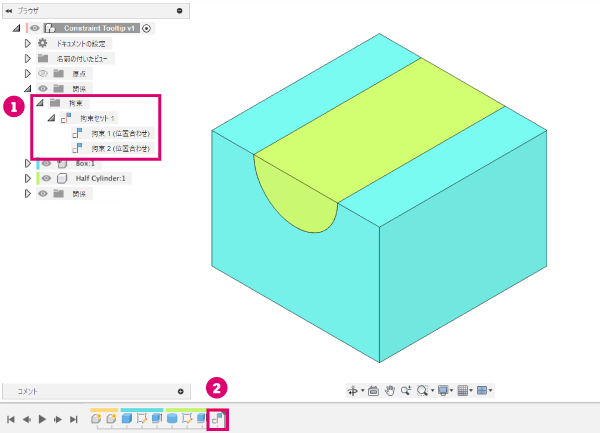
- ブラウザの [関係] > [拘束] フォルダ内
- タイムライン内
ジョイント
[ジョイント] は、アセンブリ内の 2 つのコンポーネント間の相対的な位置とモーションを定義するメカニカル アセンブリ関係です。[ジョイントの原点] (カスタム座標系)を使用して、コンポーネント同士をスナップさせます。
コンポーネントを移動してアセンブリをデザインする際、モーションのシミュレーションはプロトタイプ作成プロセスの重要な部分になります。
Fusion では、アセンブリ関係によってコンポーネント間の関係の複雑さが軽減され、コンポーネントができないことではなく、なにが実行できるかに焦点を当てることができます。これは、利用できる自由度(DOF)をロックしてモーションを制限する、拘束やメイトなどの他の手法とは異なります。このような手法では、アセンブリ内のコンポーネントが確実に意図したとおりに移動するように、関係する基本的な物理特性と計算を理解する必要があります。
一方、ジョイントはコンポーネント間のモーションを定義し、必要な自由度だけを残してそのモーションを作成します。これにより、物理特性をそれほど深く理解していなくても、モーションとその結果を理解することができるようになります。
ジョイントのアクセス ポイント
アセンブリ内に作成したジョイントを操作できるアクセス ポイントは 3 つあります。
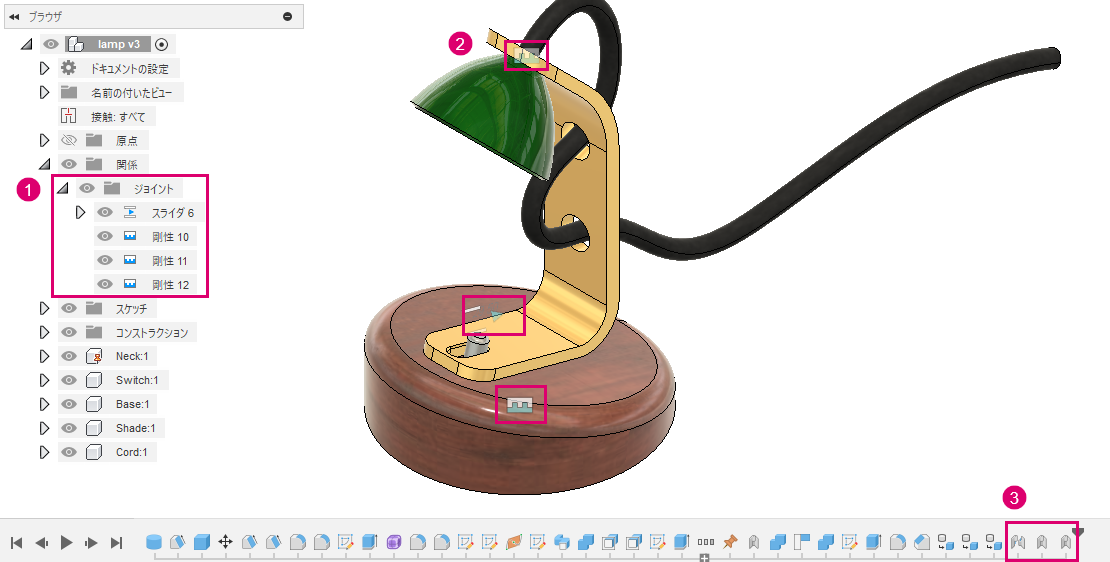
- ブラウザの [関係] > [ジョイント] フォルダ内
- キャンバス でコンポーネントに対して直接(ジョイントタイプのアイコンで指定)
- タイムライン内
キャンバスまたはブラウザで既存のジョイントを右クリックし、次の追加ツールを使用してジョイントを修正することができます。
- [ジョイントを編集] : [ジョイントを編集] ダイアログが開き、ジョイントに関連付けられたすべての設定を編集できます。
- [ジョイント制限を編集] : [ジョイント制限を編集] ダイアログが開き、ジョイントの最小、最大、および残りの制限を編集できます。
- [ロック] : ジョイントの現在の位置と設定をロックします。
- [抑制] : ジョイントがコンポーネントに作用するのを防ぐために、ジョイントを一時的に削除します。
- [ジョイントをアニメーション表示] : 単一のジョイントをアニメーション表示します。
- [モデルをアニメーション表示] : アセンブリ内のすべてのジョイントをアニメーション表示します。