Una volta completata la regolazione dei minimi quadrati, la matrice di covarianza consente di calcolare le deviazioni standard di posizione ![]() e
e ![]() .
.
Nella seguente illustrazione viene mostrato che le deviazioni standard rappresentano le quote a metà larghezza del rettangolo d'errore standard al 68% di probabilità intorno ad ogni punto:
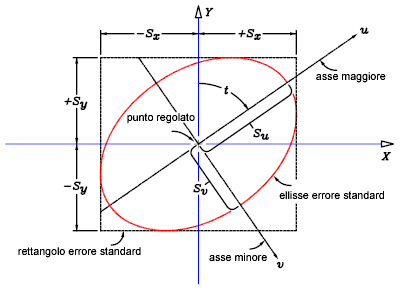
Dove:
- t = orientamento dell'ellisse d'errore, direzione del semiasse principale
- u = semiasse principale dell'ellisse d'errore
- v = semiasse secondario dell'ellisse errore
- x = quota metà larghezza del rettangolo d'errore
- y = quota metà altezza del rettangolo d'errore
- S = deviazione standard di posizione di un punto